
But that’s exactly the goal that mechanical engineers at Rutgers University had when they set out to build a cutting-edge, pneumatic wheel and axle assembly that could help make soft-wheeled robots a vital part of future rescue missions or deep space planetary exploration.

“Upon seeing this work, a friend suggested that we have committed the proverbial reinventing of the wheel,” Aaron Mazzeo, assistant professor in the Department of Mechanical and Aerospace Engineering, tells Digital Trends. “I am fine with that perspective, as we hope squishy wheels and joints will complement current progress in soft locomotors and actuators.”
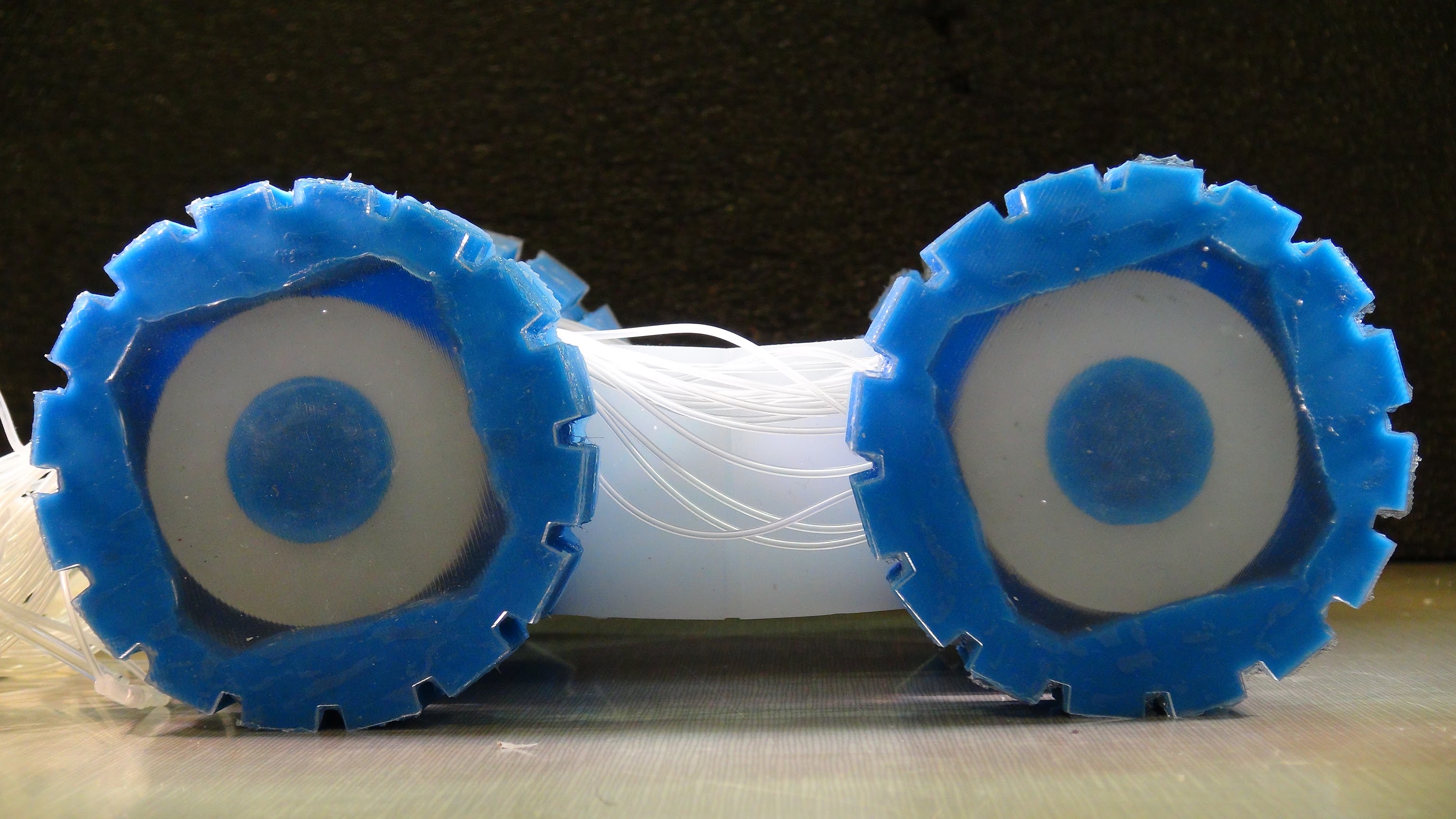
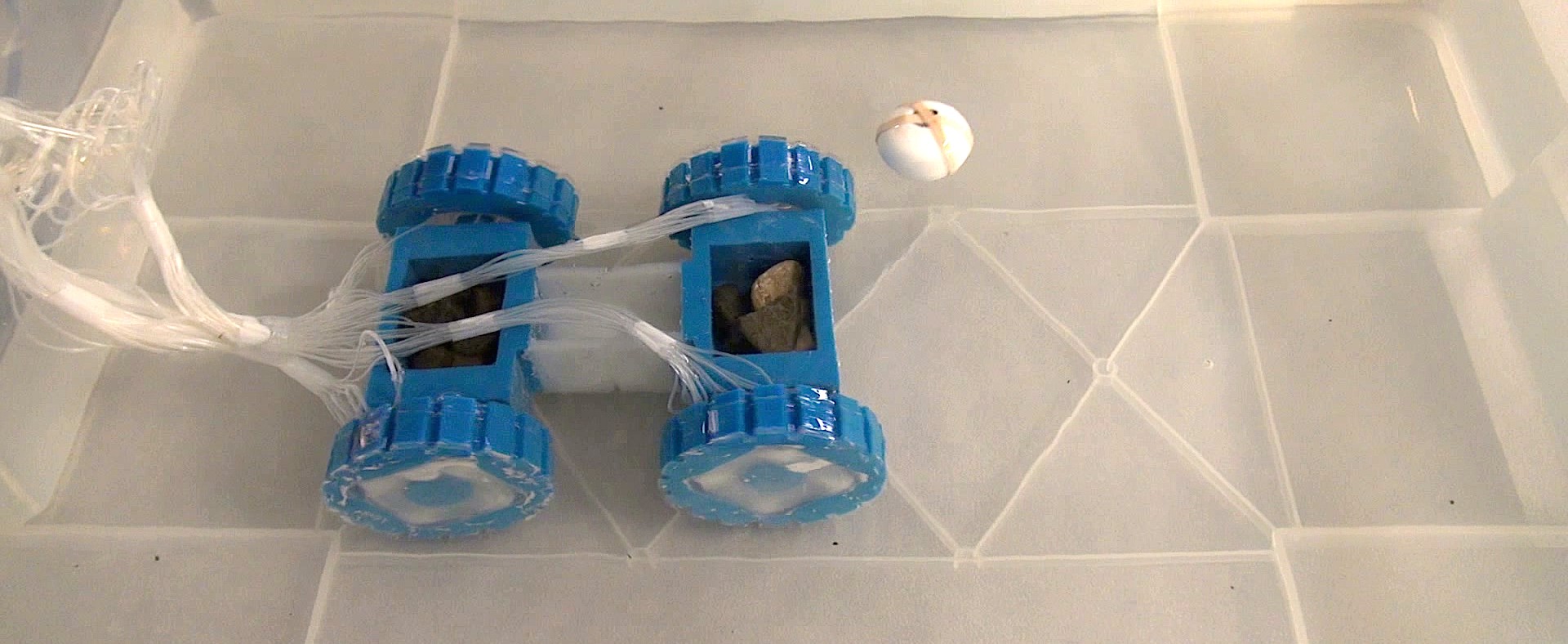
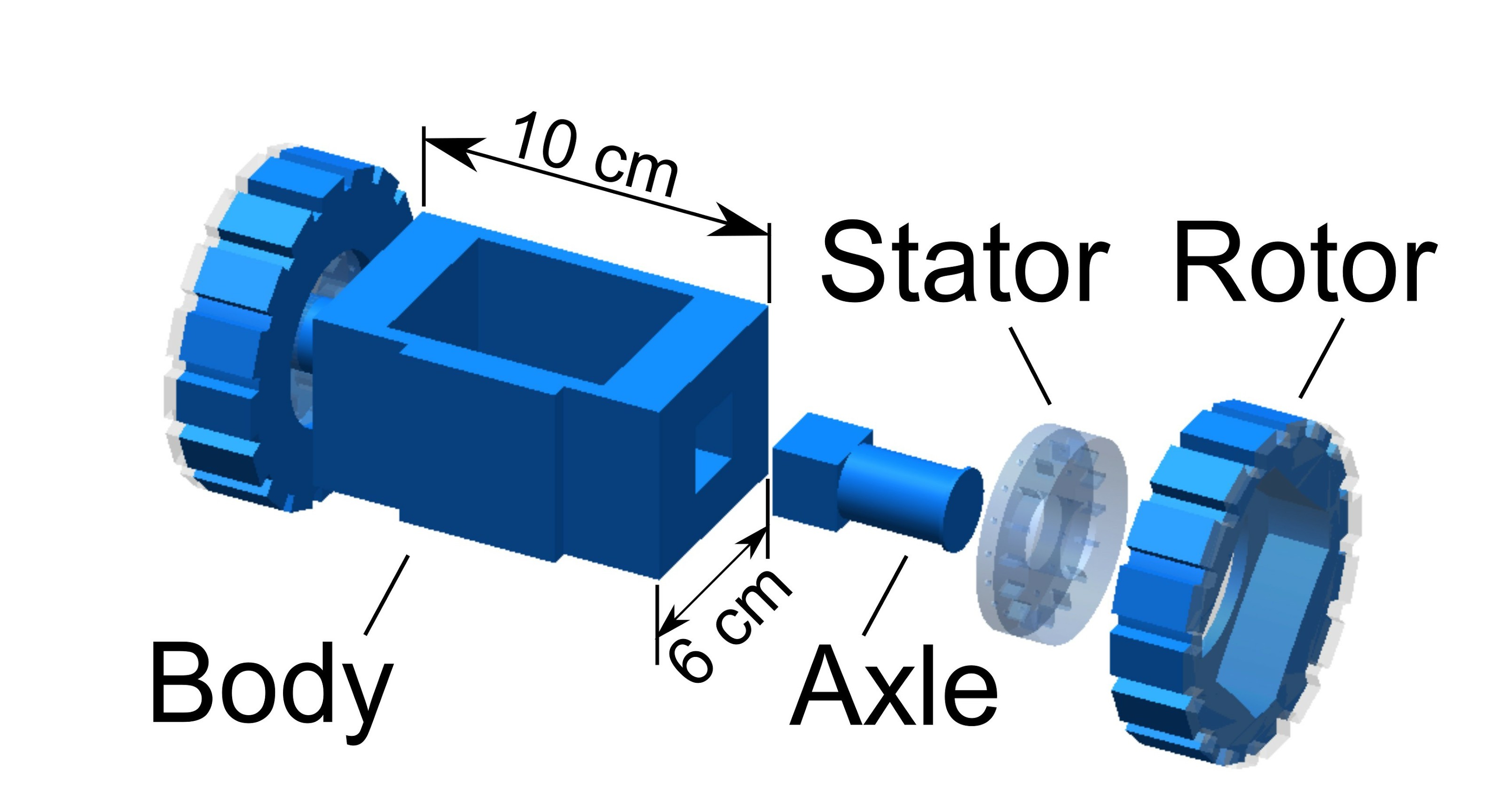
The big advance in the work is the creation of a soft motor capable of providing torque minus any bending or extending of its housing. “The introduction of the ‘wheel-on-axle’ configurations extend the potential functionality of soft robotic systems by providing controllable rotational torque and transporting payload, without requiring bending or twisting,” the project’s lead author Xiangyu Gong — now a doctoral student at New York’s Rensselaer Polytechnic Institute — tells Digital Trends. “This work marks initial steps toward designing more versatile, soft-material-based systems capable of millimeter-scale, continuous rotary actuation.”
By building a soft, metal-free motor, the resulting Rutgers robot is ready to take on the harshest of environments — and could even survive the effects of electromagnetic fields without problem. The fact that it is made from silicone rubber also makes it far more durable and able to cope with tough impacts, as well as survive falls of up to eight times its height.
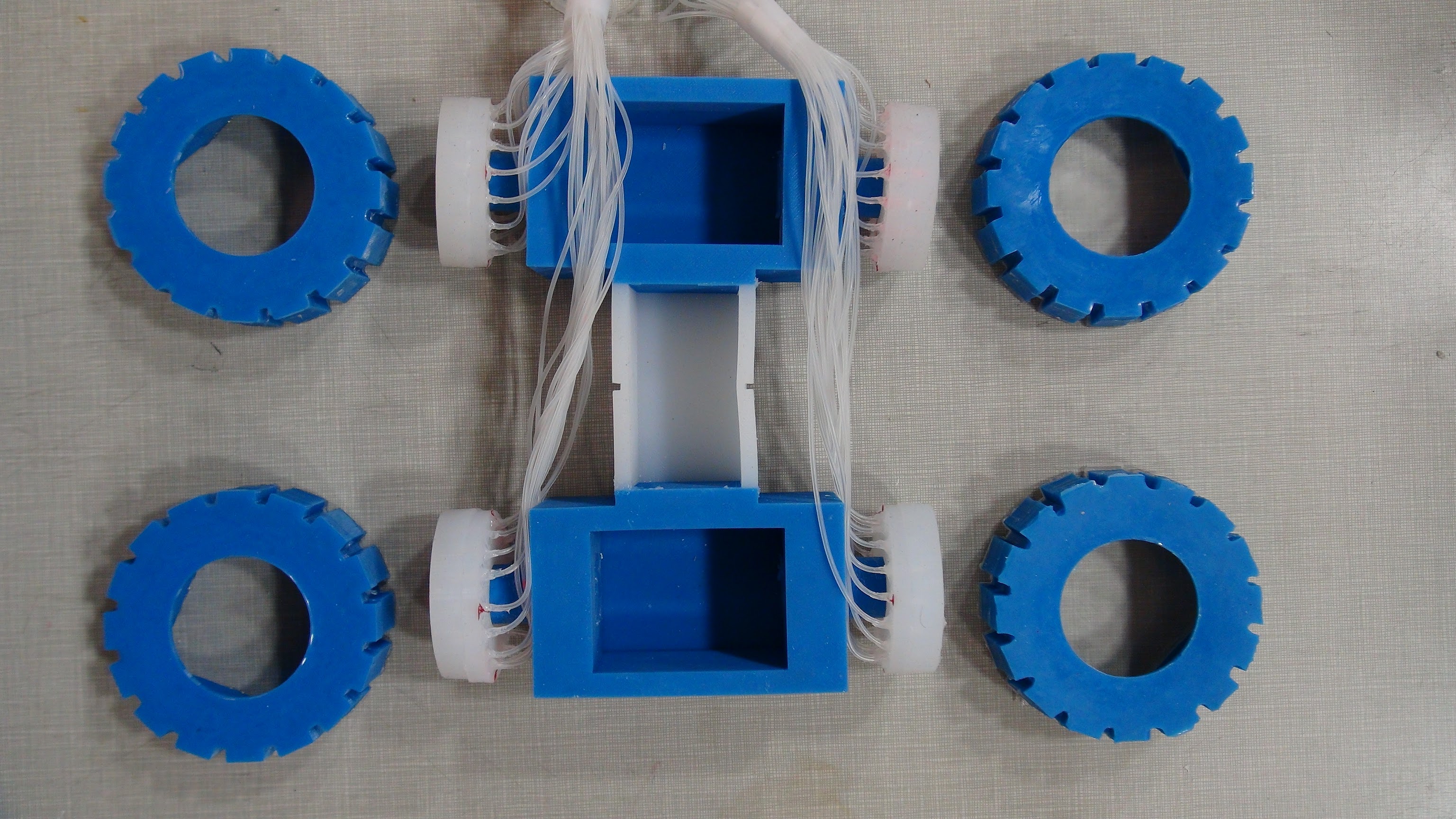
“There are still a number of scientific and engineering issues to work out before we would see practical implementations of these types of joints/wheels,” admits Mazzeo. “We use pneumatics — so work on storing, releasing, or distributing fluid power in timed fashions will be important. There are also [currently] issues with the durability of the materials. These soft pneumatic systems can involve large strain and stretching (imagine stretch marks!) that contribute to degrading performance over time. However, the soft robotic community is aware of these issues, and I am confident we will see future progress to overcome them.”
Editors' Recommendations
- This tiny robot tank could one day help doctors explore your intestine
- Harvard looks to the natural world to make its snake robots even faster



