
Most robots are pretty good at seeing, but touching? That’s been a much tougher problem. While humans instinctively know how hard they’re gripping a coffee mug or pressing a button, robots have traditionally relied on complex arrays of tiny sensors to estimate the same thing. Now, researchers at Queen Mary University of London believe they’ve found a much simpler solution: make touch visible.
A sensor that turns touch into color
As per the study published in Science Advances, their new tactile sensor changes color whenever pressure is applied, allowing a standard camera to “see” exactly how an object is being touched in real time.
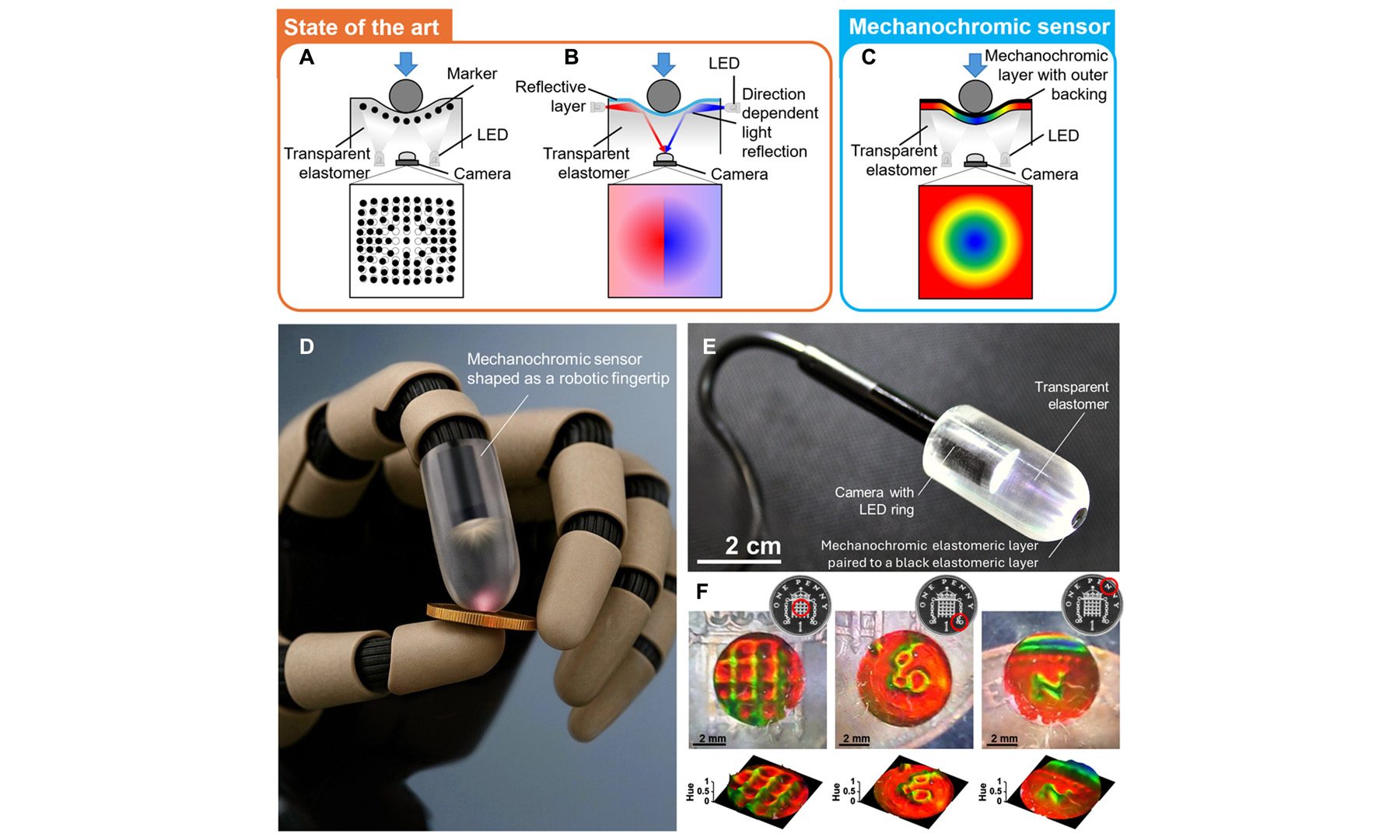
Instead of embedding thousands of electronic pressure sensors into a robotic fingertip, the new system builds the sensing directly into the material itself. When the soft surface is pressed, it produces vivid color patterns that instantly reveal where pressure is being applied, how much force is being used, and even how the material is deforming.
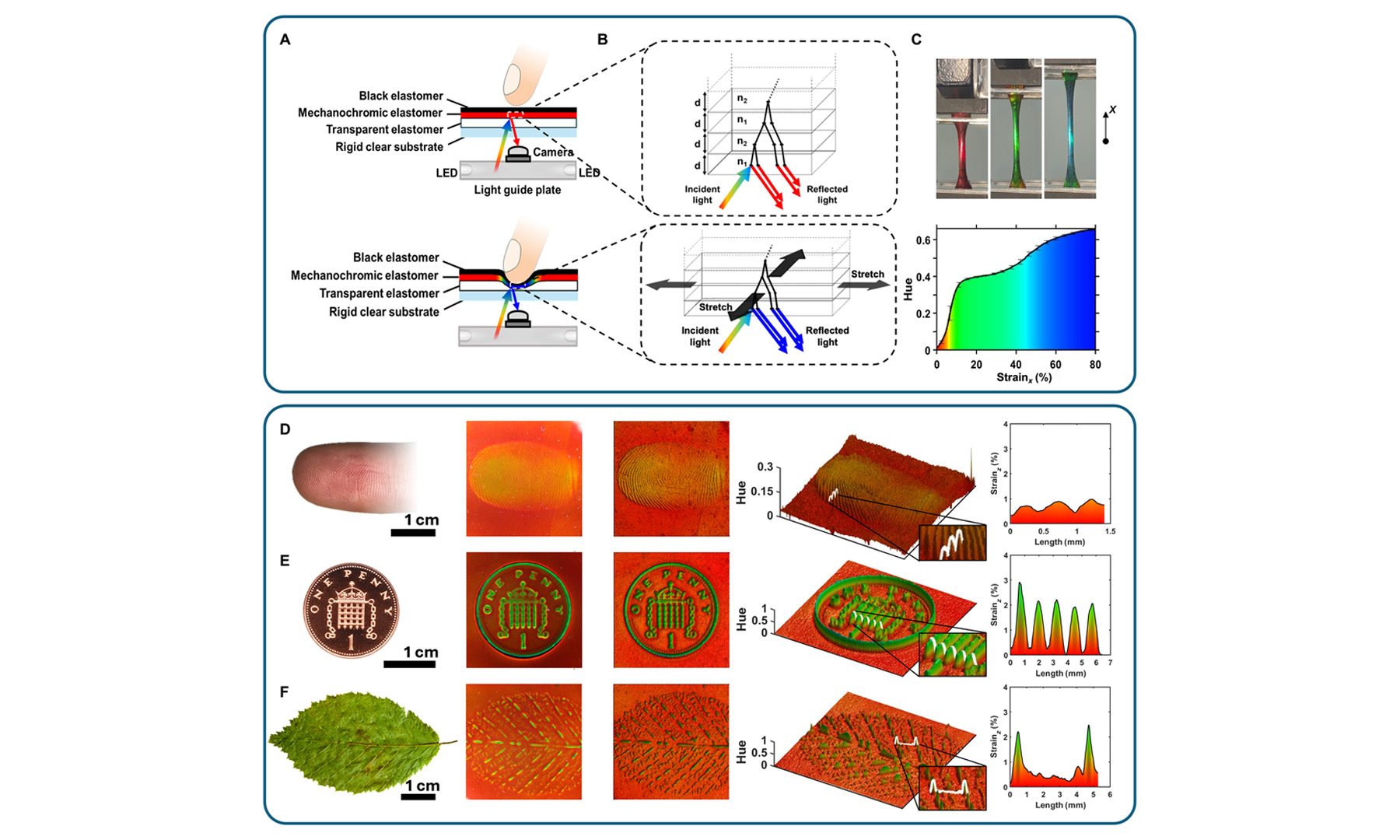
The clever bit is that those colors can be captured using an ordinary low-cost USB camera. That means robots no longer need computationally intensive software to reconstruct touch from sensor data. They can simply “look” at the color patterns and immediately understand what they’re feeling. According to the researchers, this produces high-resolution pressure maps while dramatically simplifying the overall hardware.
Why this matters beyond the lab
The impact goes well beyond giving robots a better sense of touch. Researchers believe the technology could help factory robots assemble tiny components more precisely, enable prosthetic limbs to feel more naturally, and even help surgical robots distinguish healthy tissue from abnormal tissue during delicate procedures.

More importantly, the new sensor could solve one of robotics’ biggest headaches. Traditional tactile systems often force engineers to choose between speed and accuracy. By turning pressure directly into visible color patterns that a simple camera can read, the new approach delivers both: allowing robots to “see” touch in real time instead of relying on complex computations.



