Structures like the International Space Station are too big and heavy to be built on Earth and then launched into Earth as one piece. Instead, the ISS was assembled in space like a giant Lego set, using large modules that were delivered via multiple rocket launches over a 12-year period. That’s tough enough when you’re dealing with a structure designed to float in Earth orbit. But how about when space exploration takes the next step and humanity wants to build complex constructions further afield, such as on Mars?
That’s where a new MIT project comes into play. Epitomizing the mantra “teamwork makes the dream work”, it showcases a system of tiny collaborative robots — nicknamed relative robots — which could one day work together to build high-performance structures, ranging from airplanes to houses to space settlements.
The V-shaped robots, called Bipedal Isotropic Lattice Locomoting Explorers (or BILL-E), resemble miniature arms. Moving like inchworms, they can piece together small three-dimensional modular pieces, called voxels, into larger structures. In the same way that an image of any complexity can be reproduced on-screen using simple square pixels, the idea of BILL-E’s creators is that the robots could achieve the same in the three-dimensional world. Each voxel can be picked up and placed in position by the robots, then connected using a special latching system that is part of each building unit.
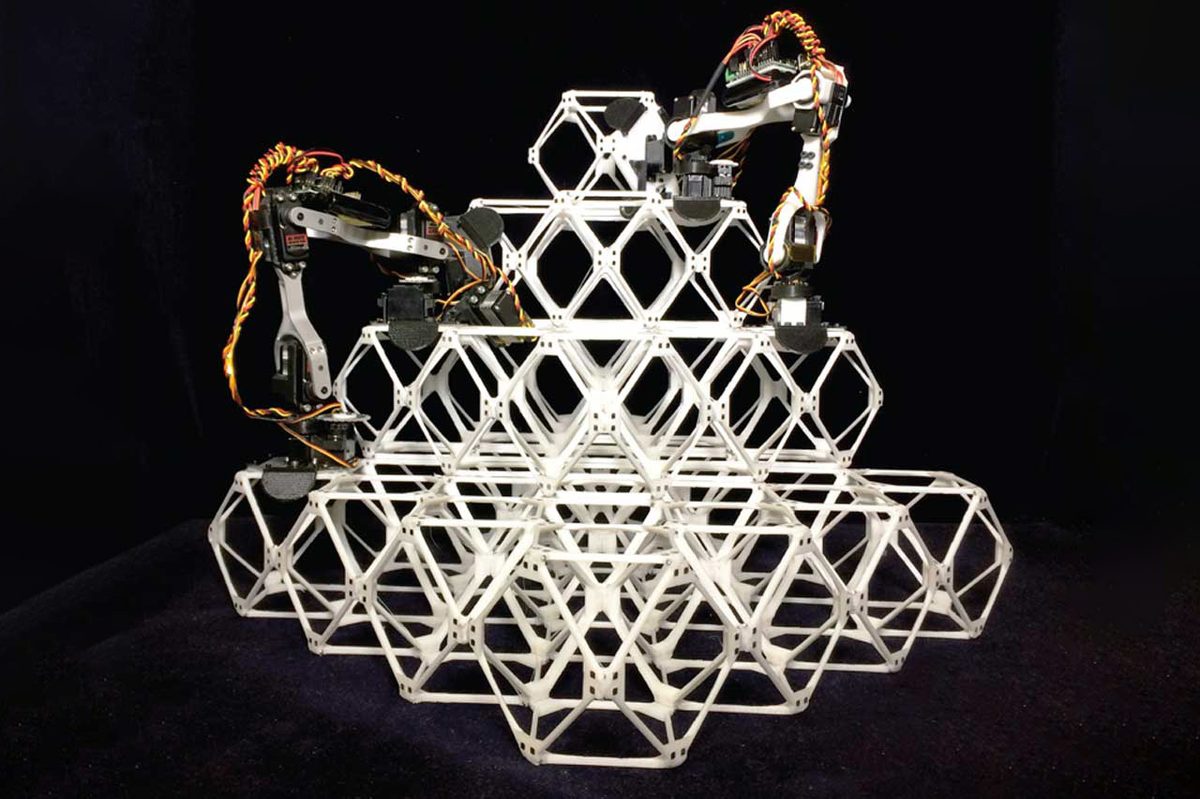
“Our robots can build structures bigger and more precise than themselves,” Benjamin Jenett, one of the main researchers on the project, told Digital Trends. “There is no ramp up in cost for infrastructure beyond making the individual voxel components and simple robots. In this sense, geometric complexity comes at little to no cost. Relative robotic assembly uses a simple, repeatable procedure to produce high-performance structures on-demand, where single assembly is final assembly.”
Teamwork makes the robot dream work
There’s no doubt that MIT’s voxel-building BILL-E robots are exciting. But perhaps the most exciting aspect of them is what they suggest about the next frontier for robots. For more than half a century, at least since SRI International researchers build the first general-purpose mobile robot, engineers have been rightfully excited about the possibility of using robots.

Today, robots are being used in a breadth of applications. The people who build them promise that they will be able to carry out the dull, dirty, dangerous, and high-dollar jobs that humans are less suited for. But while one robot may be useful, it’s increasingly teams of robots that offer a glimpse at where they may be at their most valuable. Evidence of where teams of machines can triumph is evident at all different scales. There are small robots like the relative robots developed by MIT. However, those same principles of collaboration apply to larger robots, too.
Last year, Boston Dynamics released a short video in which two of SpotMini robots worked together to achieve a common goal: opening an office door. That is a constrained, simplified illustration of collaboration, but it nonetheless showcases how multiple machines can work together to carry out tasks that would have been far more difficult, or even impossible, on their own.
There are a wide variety of problems that such collaborative robots promise to solve. In some cases, it’s avoiding or removing obstacles, such as in the case of the door-opening SpotMinis. In others, it might be exploring large areas using multiple robots each tracking their own individual paths, but coordinated so as to cover a wide area without stepping on each other’s toes. This can be useful for things like mapping. It can also allow robots to improve their abilities, by learning through trial and error and then conveying this information to the others in the party; allowing all involved to grow smarter at a faster rate.
Robot teams are everywhere
Examples of team-based collaborative robots are everywhere. At Columbia University in New York, Professor Hod Lipson and his team have developed a swarm of disc-shaped robots that can connect together to form a variety of different form factors. For instance, if it needs to move through a gap, the robots can rearrange themselves into a shape that lets them travel through it, before reassembling as a wider structure on the other side.
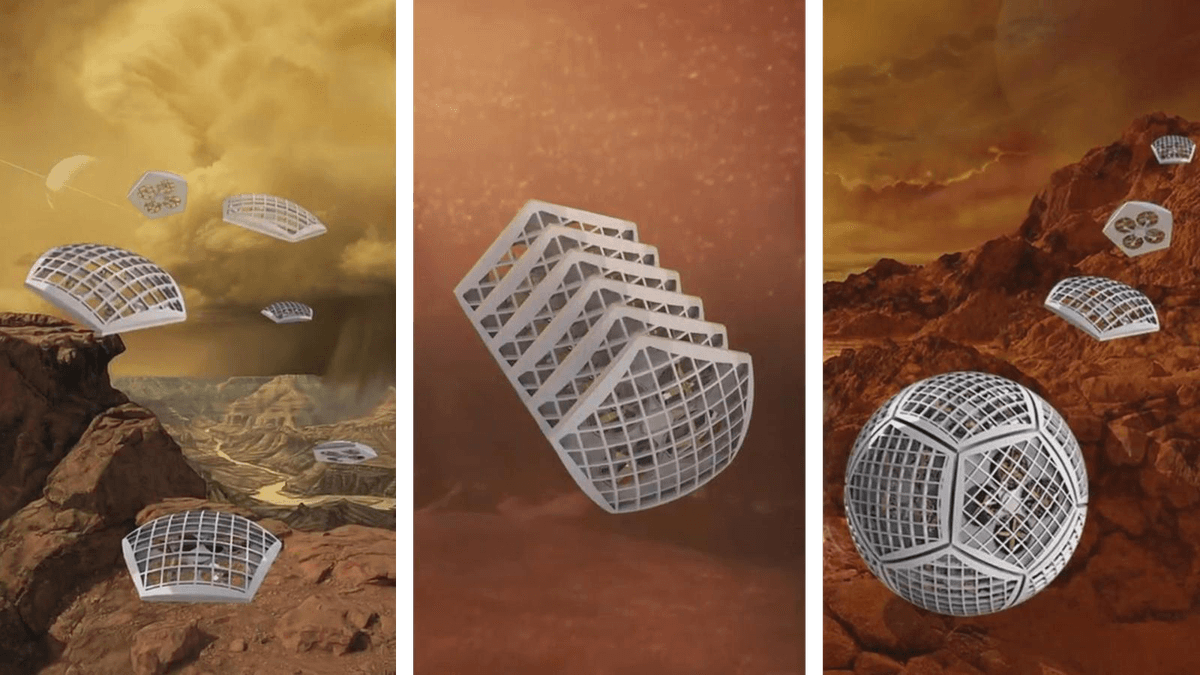
Meanwhile, as part of NASA’s Innovative Advanced Concepts program, the renowned space agency is working on a project revolving around a group of robots called “cobots.” These cobots can work as a team to explore areas such as caves but also work together to make possible new types of locomotion. One day, NASA hopes they could be used to explore other planets.
These approaches are incredibly exciting. However, in both examples, the robots being employed are identical to one another. That does not have to be the case. In fact, in many scenarios, it might be more helpful if teams of robots were made up of robots with broadly different skills. You know, like efficient teams of humans.
Consider, for instance, cooperative robot teams working together in a search and rescue mission following a natural disaster. This is something that is already being actively explored due to the danger inherent in sending in human rescuers. But while having multiple units of the same robot could undoubtedly be useful in certain rescue environments, being able to bring together robots with different skill sets could prove even more valuable.
Imagine using a scout-type robot with advanced optics capabilities in combination with a heavier robot that’s there to move rubble out of the way or bringing food and water to victims. This ability to use multiple types of robots together is something currently being explored in DARPA’s Subterranean Grand Challenge. Entrants in the contest must develop autonomous robots to explore underground environments. Rather than being limited to one type of robot, though, they can build tag teams comprising multiple types of machines, ranging from four-legged canine-inspired bots to flying drones.
It’s all about control
As anyone who has ever worked in a team will know, of course, leadership is a big question when it comes to dictating goals. When it comes to robots, this is no less a concern — and there are multiple possible answers.
“We employ a centralized, as opposed to distributed, control architecture,” Benjamin Jenett, a researcher on the BILL-E project, said. “This means that a single entity, in this case a laptop, computes [the entire] build sequence and robot path-planning, and sends commands wirelessly to the mobile robots. Robots then execute this path which consists of a small set of prescribed motions — step, turn, pick up, place — with a finite amount of sensing for feedback.”
Getting multiple robots to talk to one another is a massively complex problem, requiring plenty of advance planning.
Jenett notes that this kind of centralized control architecture can achieve optimal results more easily since everything is programmed ahead of time. In this case, the “single entity” he refers to is like the project manager on a building site: planning everything in advance and making sure that every member of the team knows what they are supposed to be doing. However, it’s not a perfect solution as it makes it vulnerable to a single point of failure. As a result, Jenett said that the team is looking into distributed control systems for the future.
“This requires more autonomy from the robots, [meaning] sensing and decision making,” he said. “But we feel that our hardware can easily be modified to incorporate these changes in the coming phases of this work.”
This challenge will continue in the years to come. Getting multiple robots to talk to one another is a massively complex problem, requiring plenty of advance planning. However, advances in swarm intelligence will also allow robots to function together in certain applications with distributed forms of intelligence. Like a flock of birds, where each bird is responding to its nearest neighbors but no bird is leading the flock, this has enormous potential. Especially when it comes to improvising strategies.
Just the start of the story
Right now, we’re still at the start of this particular journey. Like collaborations between humans and robots in the workplace, collaborative teams of robots remain largely the province of research labs. But it won’t stay that way.
As demonstrated by everything from Starship Technologies’ delivery robots to ANYbotics’ ANYmal oil rig-inspecting robots, robots are becoming a part of everyday life. And where, right now, companies are employing one or two robots to carry out tasks, that number is bound to grow.
So they’d better start getting along — for all our sakes.