
Tying a knot or plugging a charger into a port are tasks that require human-like dexterity, but thanks to research out of MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), robots could soon be up to the task.
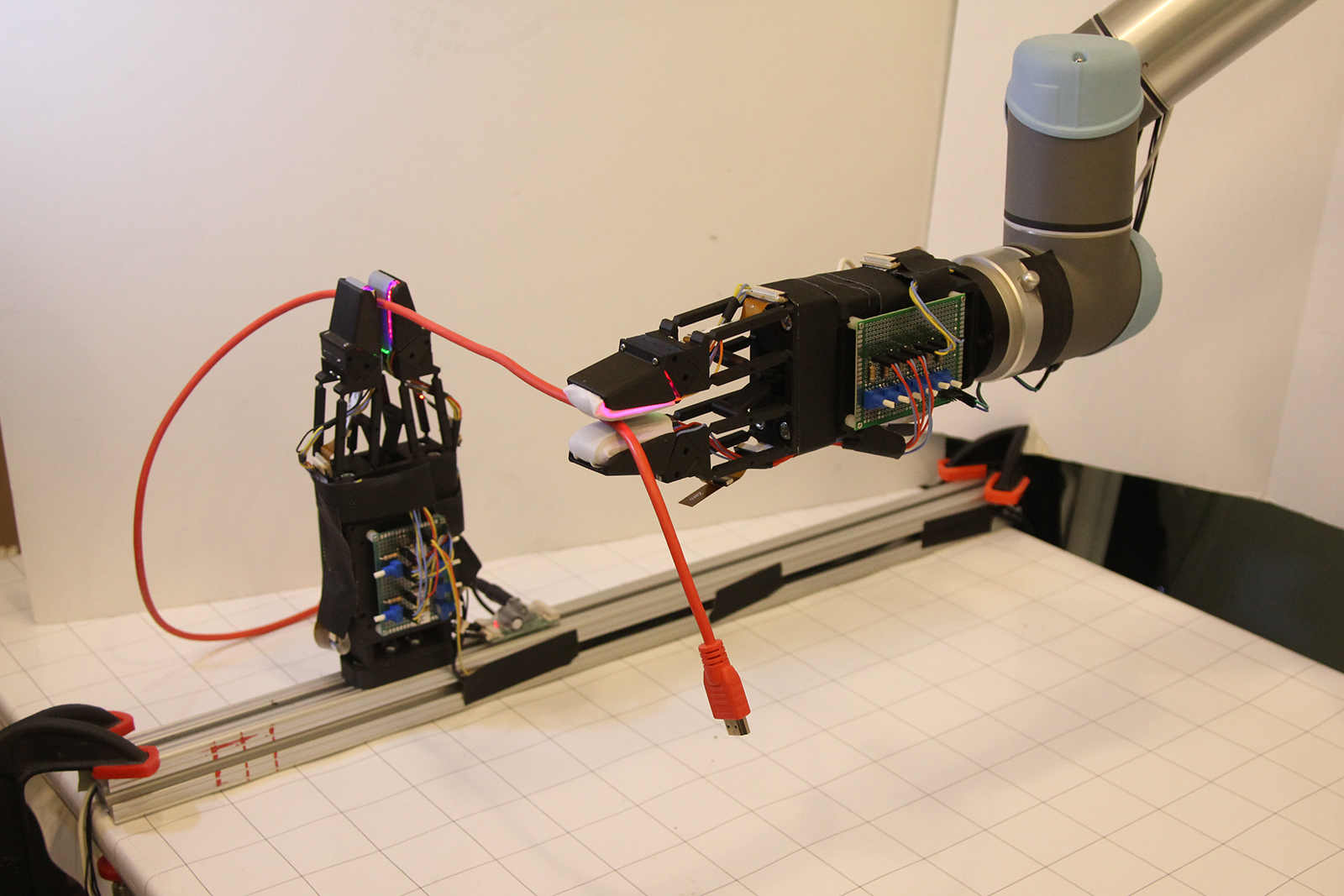
By embedding sensors created using rubber and cameras, the team was able to create a bot capable of working with rope, cord, and wires in a more human-like manner.
Each of the robot arm’s two fingers is equipped with sensors called GelSight. These sensors use tiny cameras embedded in soft rubber. The cameras allow the robot to understand where the cable is, its size and shape, and the force as the cable slides through two fingers.
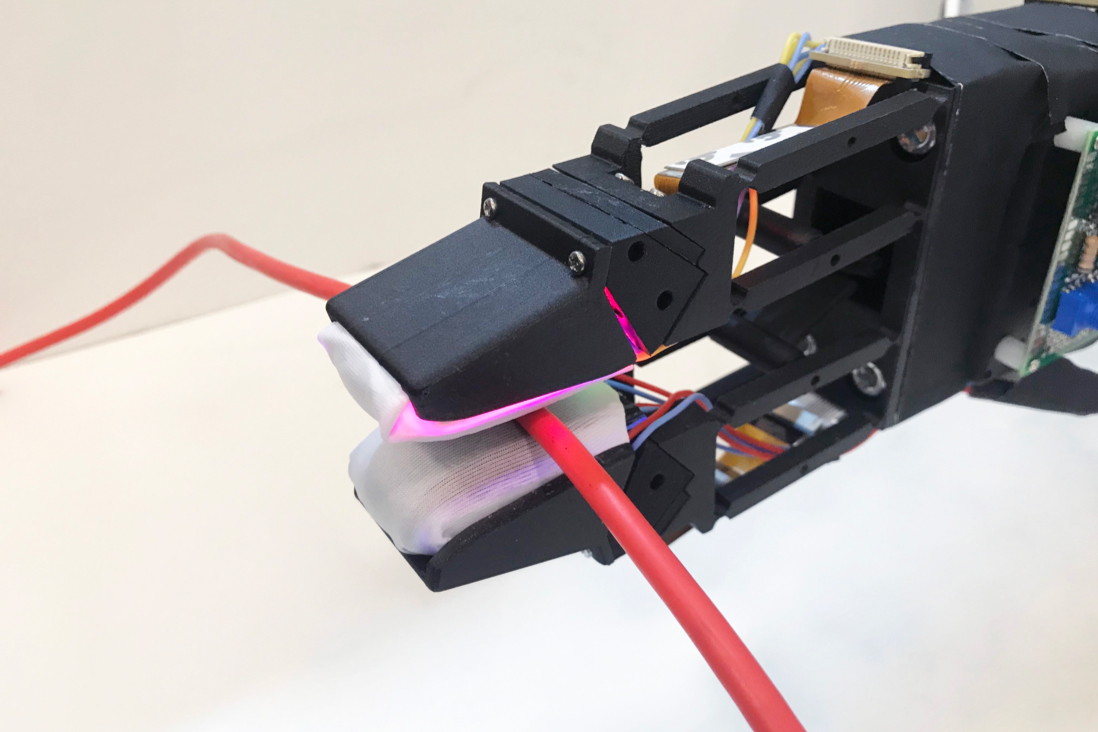
Understanding the cable’s physical properties and location is just one part of the equation. Next, the researchers built a framework allowing the robot to use that information to adjust movements in real-time in order to quickly work with that cable. The researchers developed a controller to regulate grip strength and a second to adjust the gripper’s position.
When put to the test, the robotic arm was able to successfully plug a pair of earbuds into a headphone jack, as well as working with thinner and thicker ropes, wires, and cables. While that may bring to mind a robot butler capable of plugging itself in at night, the technology is most likely destined to start in the automotive industry, though the researchers note the potential for the technology to one day be used in surgical sutures, industrial applications, and potential household uses.
“Manipulating soft objects is so common in our daily lives, like cable manipulation, cloth folding, and string knotting,” Yu She, MIT postdoctoral associate and lead author, said. “In many cases, we would like to have robots help humans do this kind of work, especially when the tasks are repetitive, dull, or unsafe.”
GelSight builds on research published last month that embedded cameras into a robot gripper to pick up objects as delicate as a potato chip. The new technology allows for cable manipulation with fewer drops, longer distances, and more accuracy than previous robotics, the team says. The group plans to research additional tasks like routing cables, as well as real-world uses such as automatically manipulating cables within the automotive industry.
Editors' Recommendations
- The iRobot Roomba j7+ monitors your floors to avoid wires, pet droppings
- A.I. fail as robot TV camera follows bald head instead of soccer ball
- MIT learns to make robots less clumsy by putting cameras in their fingers
- Roborock’s new robot vacuum packs a pair of cameras to avoid obstacles
- CES 2020: This could be the year your robot vacuum gets a security camera



