NASA’s Perseverance rover is taking a road trip across Mars, heading for a new and exciting location. The aim is for the rover to travel faster than previous rovers, making use of its self-driving system. This should enable the rover to cover the three miles to the Jezero Crater delta, which is the site of an ancient river delta which is a great site to look for evidence of ancient life, at top speed.
“The delta is so important that we’ve actually decided to minimize science activities and focus on driving to get there more quickly,” said Perseverance project scientist Ken Farley of Caltech in a statement. “We’ll be taking lots of images of the delta during that drive. The closer we get, the more impressive those images will be.”
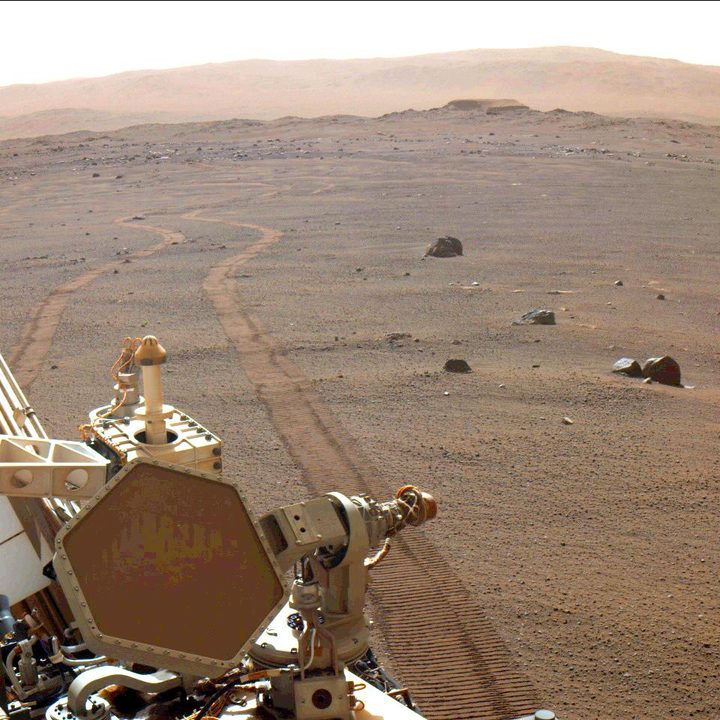
To navigate its way through the crater, Perseverance makes use of its auto-navigation system. This uses information collected by the rover’s cameras to construct a 3D map of the terrain, which helps to plot safe driving routes. While human drivers still oversee the rover’s progress, this system has allowed Perseverance to travel further in one day than any rover before.
“Self-driving processes that took minutes on a rover like Opportunity happen in less than a second on Perseverance,” said Mark Maimone of NASA’s Jet Propulsion Laboratory. “Because autonomous driving is now faster, we can cover more ground than if humans programmed every drive.”
This is enabled by improved hardware, like faster cameras and a dedicated image processing computer. “On past rovers, autonomy meant slowing down because data had to be processed on a single computer,” Maimone said. “This extra computer is insanely fast compared to what we had in the past, and having it dedicated for driving means you don’t have to share computing resources with over 100 other tasks.”
This capability means the rover is more capable of identifying and avoiding obstacles. Rover driving speeds are generally limited not by the rover’s potential top speed, but rather by the need to be careful of potential hazards so as not to damage the rover in any way. By identifying and avoiding obstacles automatically, the rover can move faster.
“When we first looked at Jezero Crater as a landing site, we were concerned about the dense fields of rocks we saw scattered across the crater floor,” Maimone said. “Now we’re able to skirt or even straddle rocks that we couldn’t have approached before.”