
 Autonomous vehicles are getting a lot attention as of late, and if this last CES prophesized anything, it’s that this tech trend has some serious mileage. With companies like Audi, Lexus, and Google exploring ways to push the driving experience into the 21st century, we’re not far from a future where driving is done by machine – not man. But before you can rush out to your local dealer (just kidding; none of these are at your local dealer) to catch a glimpse of our automated overlords, you’re going to notice one striking similarity across virtually all models: the LIDAR. We know what you’re thinking: The what-DAR?
Autonomous vehicles are getting a lot attention as of late, and if this last CES prophesized anything, it’s that this tech trend has some serious mileage. With companies like Audi, Lexus, and Google exploring ways to push the driving experience into the 21st century, we’re not far from a future where driving is done by machine – not man. But before you can rush out to your local dealer (just kidding; none of these are at your local dealer) to catch a glimpse of our automated overlords, you’re going to notice one striking similarity across virtually all models: the LIDAR. We know what you’re thinking: The what-DAR?
Frikkin lasers
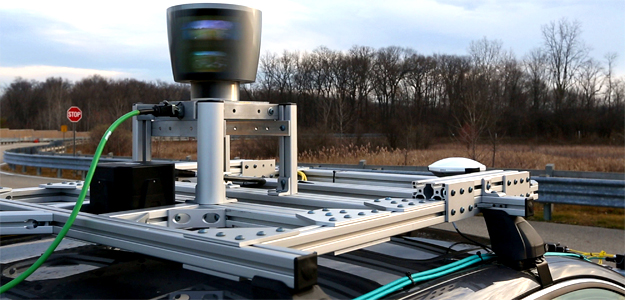
One of the most integral, expensive, and noticeable pieces of equipment found in an autonomous vehicle is the roof-mounted, Death Star-like LIDAR sensor. LIDAR, which stands for Light Detection and Ranging, is a remote-sensing technology that measures and maps the distance to targets, as well as other property characteristics of objects in its path. LIDAR essentially maps its surroundings by illuminating its targets with laser light and then analyzing that light to create a high resolution digital image.
While LIDAR sensors are employed in virtually all autonomous research vehicles, the technology has already featured in cars with adaptive cruise control systems (ACC).
In vehicles with ACC, a LIDAR device mounted on the front of the vehicle, like the bumper, is used to monitor the distance between that vehicle and any car in front of it. If the vehicle in front slows down or gets too close, ACC independently applies the brakes to slow the vehicle down. When road conditions open up, ACC allows a vehicle to accelerate to a speed preset by the driver. Refer to my review of the 2013 Mercedes SL550 for an example of a vehicle with adaptive cruise control.
Roof-mounted LIDAR sensors function a little differently, however, and behave similarly to what you’d see atop a satellite installation on an airfield or aboard a small fishing vessel.
Here we have a low-spinning dish (say 1 rpm) gathering long range, low resolution targeting of other objects (other vessels or aircraft for example). This low-res feedback may work for stationary installations, but vehicles need much higher resolution imagery and at much closer range.

While not official figures, the rpm count on, say, Lexus’s AASRV vehicle, shown at CES, might spin at 600 rpms. This increase in rpms allows the vehicle to map its surroundings with greater detail, speed (less than a dozen milliseconds), and accuracy, which is essential on a roadway where conditions are constantly changing.
Currently, LIDAR sensors are not built in-house, but they are commercially available – and expensive. Oh so very expensive. A top-of-the-line Velodyne sensor, for example, can fetch $70,000 a pop and can be found hypnotically spinning atop Google’s, Lexus’, and Audi’s research vehicles.
Roadmap to autonomy
LIDAR might be the most conspicuous piece of driverless tech, but as Paul Williamsen, Global Manager of Education and Training for Lexus International, tells me, the anatomy of autonomous vehicles, including LIDAR, encompasses four relatively broad domains:
- Making a vehicle in which you can control the steering, the power delivery, and the breaking – all automatically.
- Technology that allows the vehicle to sense the environment around it
- The processing – what does that vehicle determine, what decisions does it make based on the sensing of what is going on around it
- The output – what actions does the vehicle make based on that processing
The wave of the future
In addition to LIDAR providing sensory feedback, autonomous vehicles employ a not-so-new technology called millimeter-wave radar, which involves various infrared and optical sensors placed at the front of, sides, and rear quarters of a vehicle.
As you’ll no doubt recall from high-school science class, millimeter-wave radar emits extremely high frequency (short) wavelengths, which is ideal for detecting objects (cars, pedestrians, and large animals) in a vehicle’s immediate vicinity.
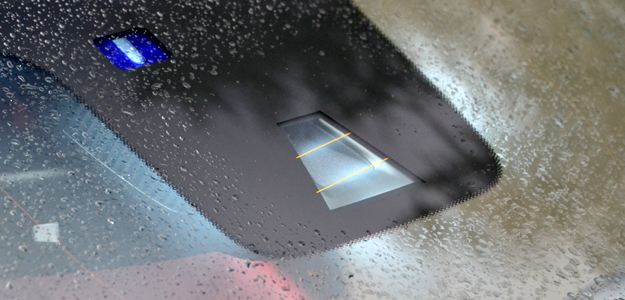 Infrared and optical sensors already feature heavily in current Audi, Lexus, Acura, Subaru, and Mercedes vehicles. Lexus’ 2013 LS 460, for example, sports what is called an Advanced Pre-Collision System (A-PCS). This works in conjunction with millimeter-wave radar, front facing near infrared projectors, and a front-mounted stereo camera. Essentially, A-PCS is designed to avoid low-speed collisions by scanning vehicles in the near-to-far vicinity, determining potential collisions, and emitting audio visual indicators if a danger is present, and eventually operating autonomously by applying emergency braking countermeasures.
Infrared and optical sensors already feature heavily in current Audi, Lexus, Acura, Subaru, and Mercedes vehicles. Lexus’ 2013 LS 460, for example, sports what is called an Advanced Pre-Collision System (A-PCS). This works in conjunction with millimeter-wave radar, front facing near infrared projectors, and a front-mounted stereo camera. Essentially, A-PCS is designed to avoid low-speed collisions by scanning vehicles in the near-to-far vicinity, determining potential collisions, and emitting audio visual indicators if a danger is present, and eventually operating autonomously by applying emergency braking countermeasures.
As you can see, autonomous vehicle technology is a mixture of sensing and processing protocols. While millimeter wave radar sensors can be placed in and around the vehicle, such examples, like the ones seen on both Google and Lexus prototypes, typically feature even more sensors hung from brackets off a vehicle’s bumpers. These allow for even greater radar sensing to the sides of the vehicle, as opposed to just the front. This way, information can be gathered accurately in adjacent lanes, cross-streets and intersections.
The brains of the bunch
Of course, all this information needs to be collected and processed, which is why autonomous vehicles now and in the future will make use of relatively powerful onboard computers. As Lexus’ Paul Williamsen explains, “The vehicle we showed at CES actually has a number of high-powered computers in the trunk of the car, computers that you and I might have on your desktop.”
In contrast, the computers currently occupying space in our vehicles are relatively dim-witted by comparison, as Williamsen further explains, “the most powerful computer in a conventional vehicle is a very simple computer, because we need absolute complete reliability, they run at a fairly slow clock speed, they run at a fairly low amount of memory, and at a fairly simple number of words in their total programming and that’s because we need absolute boat-anchor levels of reliability”
“For autonomous vehicle research we are using computers … that are hundreds or thousands of times more powerful to do the processing, to put together the information of the complex LIDAR images and the information we are getting from multiple millimeter wave radar sensors.”
Driving, minus the driver

So we have LIDAR, we have millimeter-wave radar, and we have an all-powerful Autobot brain running the show. But what’s actually driving digital Miss Daisy? For an autonomous vehicle to work, it needs to be controlled electronically, automatically, or to borrow a much more science-fictional term, robotically. These “robots” won’t overthrow the government, but instead kindly take over all the minutiae of driving. More than that, they all need to work in unison and, perhaps more importantly, independent of any human input.
In Toyota/Lexus’ case, its vehicles, namely its hybrid vehicles, already have what the company refers to as a “sophisticated hybrid system” capable of electronically controlling braking, steering, and acceleration. This particular domain of autonomous vehicle technology is essential, and is one of the reasons why Google utilizes Toyota/Lexus hybrids. In doing so, the Internet giant doesn’t need to develop its own electronically controlled interface, but instead simply figure out a way to reverse engineer the communications that allow it to create various steering, throttle, and braking commands.
While LIDAR is certainly the most visually prominent piece of driverless tech, every aspect of an autonomous vehicle is delicately intertwined with this spinning centerpiece. The automated steering controls depend on the millimeter-wave radar, while roof-mounted LIDAR frantically collects and maps vital information. That information needs to be processed, calculated, and ultimately fed back to the automated controls; thus completing this halcyon circle of automotive wizardry.



