Whether it’s climbing up vertical surfaces or carrying out fine manipulation of objects, there are robots capable of performing virtually any physical task in 2017. But usually, it is not one single robot that can do it all. That is part of what makes a new modular robotics project by researchers from the Swiss Federal Institute of Technology so ambitious — and exciting.
Describing their work as being to build the Swiss army knife of robots, researchers at the institute have developed a fleshy-looking robotic soft artificial muscle, powered by vacuum. By connecting the robot segments together in different ways, the ensuing creations can execute a wide variety of tasks. And all while looking a bit like something out of a David Cronenberg movie!
“Using vacuum makes various capabilities for a robot possible, including force and motion, suction for grabbing objects and climbing, and adds a layer of safety to already soft, safe systems,” Jamie Paik, founder and director of the university’s Reconfigurable Robotics Lab, told Digital Trends. “Our modules are the beginning of a hopefully new trend in soft robotics as a whole, which is to provide a sort of a toolbox kit for building soft robotic systems that suit a wide range of applications.”
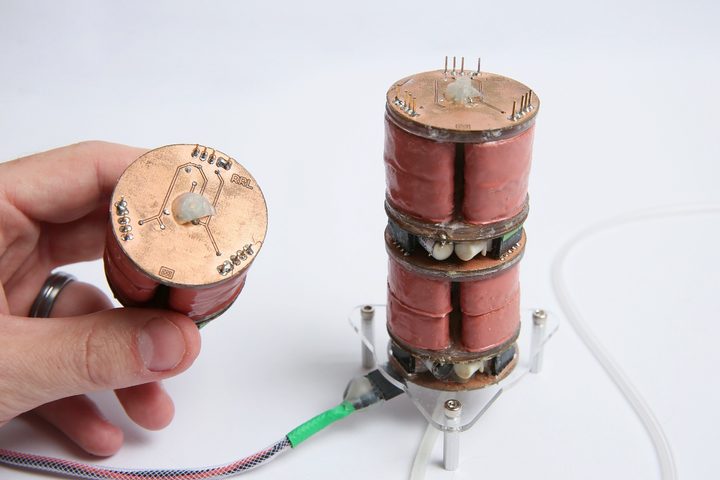
According to Matt Robertson, another researcher on the project, artificial muscles are exciting because they serve as as an alternative to conventional motors and servo drives. This particular artificial muscle is especially intriguing because, by using suction for manipulation — rather than the air pressure that drives most artificial muscle-based robots — it is much closer to the way that humans move their limbs.
“Our future work will build on this current project, and put the concepts of both soft robot modularity and vacuum power to the test in new applications,” Paik continued. “Additionally, we aim to make the process of low-level design for systems and the actuators themselves even easier by developing analytical and computational tools for predicting and testing new materials, geometries, and configurations of modules. These tools will help bring soft robotic system design into the engineering domain, allowing future research in the field to focus more on high-level applications.”
A paper describing the research was recently published in the journal Science Robotics.