
When you consider all the incredible things drones are capable of, their most remarked-upon feature is rarely their ability to come in for a landing. That is not the case for the Multimodal Autonomous Drone (S-MAD), a bio-inspired fixed-wing drone that is capable of autonomously perching and taking off from vertical surfaces, both indoors and outdoors.
The drone was developed by researchers at the University of Sherbrooke in Quebec, Canada, and was recently presented at the Living Machine 2017 conference, where it was received the “Best Robotics Paper Award.” According to its creators, the S-MAD was inspired by birds and flying squirrels, and possesses the ability to perch on rough vertical surfaces using a series of “microspines.” It can do this under a range of different weather conditions. It’s described as the first vehicle of its kind to exploit thrust in order to perform a rapid pitch-up maneuver that lets it rapidly slow its trajectory before touchdown. This allows it to take advantage of thrust assist to create a smooth and controlled descent towards the wall, which reduces the requirements for sensing, control, and energy absorption.
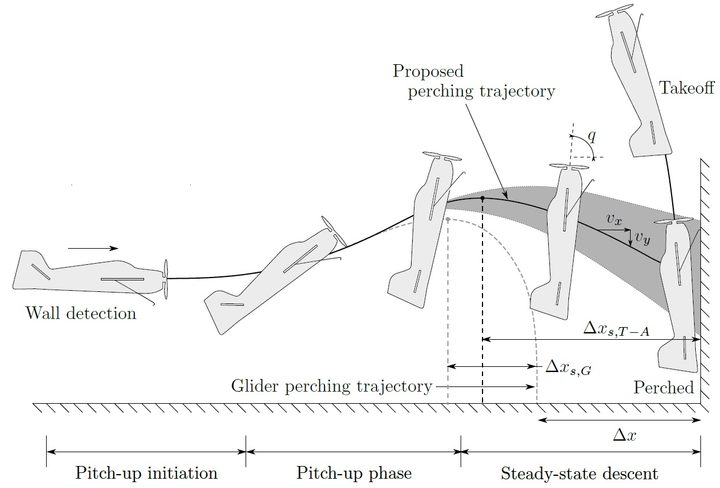
“The maneuvers starts with the airplane flying at cruise speed,” Professor Alexis Desbiens told Digital Trends. “Upon wall detection by a laser sensor, the airplane initiates a pitch-up maneuver to rapidly slow down. During that maneuver, the thrust is increased to maintain a small but negative vertical speed, and the control surfaces are commanded to maintain the perching attitude. In that configuration, the airplane can travel significant distance before touching a wall which reduces the requirements on sensing. Ultimately, the microspine’s feet will touch the wall, and the integrated suspension will absorb the remaining kinetic energy. The impact is detected with an onboard accelerometer to turn off the propeller. The airplane then settles onto the wall and can remain in that configuration, using very little energy or even recharging, for extended duration. When desired, the airplane can then take off again by using thrust and flying away from the wall.”
Desbiens said the drone is designed for carrying out extended missions; an idea University of Sherbrooke researchers have been exploring for some time. Earlier this year, we wrote about a previous drone Desbiens and his colleagues created, designed to fly short distances, land in a body of water like a lake, recharge using solar panels built into its fixed wings, and then take off again. Compared to that drone, S-MAD seems more a bit more versatile, since in most places it is easier to find vertical surfaces than it is evenly spaced bodies of water.
Possible uses for S-MAD, Desbiens says, include long duration surveillance, energy harvesting, inspection of structures, and reconfigurable sensor networks.



