
Researchers at Japan’s Hiroshima University have developed a robot prosthetic hand, controllable using only a wearer’s thoughts. The low-cost 3D-printed creation can perform a wide variety of hand gestures, and even engage in a game of rock-paper-scissors. The engineers who developed it hope that it could be used by people who have lost limbs, either through illness or accidents.
“Prosthetic hands are prescribed to patients who have suffered an amputation of the upper limb due to an accident or a disease,” Toshio Tsuji, a professor in Hiroshima’s Department of System Cybernetics, told Digital Trends. “In particular, myoelectric prosthetic hands are a type of externally powered prostheses and use electromyogram (EMG) signals, which are generated by muscle contractions reflecting a human’s internal state and motion intentions. To realize a myoelectric prosthetic hand comparable to human hands, it is necessary to achieve both the high-accuracy estimation of the user’s motion intentions from measured EMG signals and natural [and] smooth operability based on the estimated motion.”
The hand developed by the researchers responds to the wishes of the wearer; using machine learning technology to decode their EMG signals. These involuntarily created EMG signals are gathered through the wearer’s skin using electrodes in the device. The process is similar to how an electrocardiogram measures heart rate. The signals are then sent to the computer, which uses machine learning technology to quickly (within five milliseconds) work out what movement the hand should make. It then sends the necessary electrical signals to the motors in the hand.
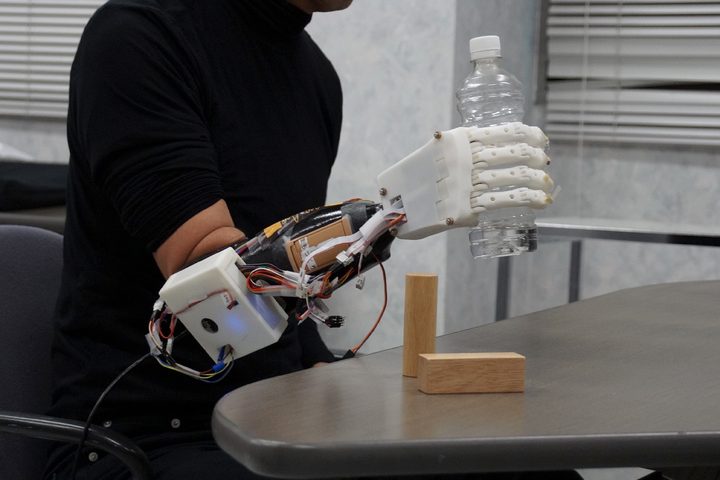
The results are impressively accurate and can generate an impressively smooth range of motions as required. To put the hand through its paces, the researchers settled on making it play rock-paper-scissors, in which the wearer imagines a hand movement, while another robot hand challenges with them by performing a competing sign. In addition, the hand can be used to pick up water bottles or shake a person’s hand.
As a practical tool, there’s still more to be done. For example, while it’s possible to use the hand to turn doorknobs, this can only be done when the doors are not heavy. That’s because the hand is able to generate just 0.5 kgf (kilogram-force) of a normal maximal grasping force. Nonetheless, the team is currently searching for a commercial partner who could help develop the project further and bring it to market.
A paper describing the work was recently published in the journal Science Robotics.



