Like a flock of sparrows or a giant school of fish, researchers in Harvard University’s Self-Organizing Systems Research Group have developed a “large-scale robot collective” capable of assembling to form a variety of different shapes.
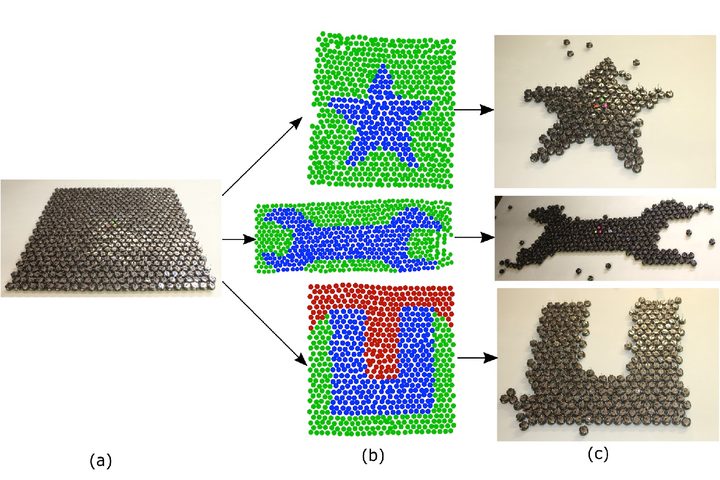
In the work — which was recently presented at the International Symposium on Distributed Autonomous Robotic Systems (DARS) — the 725 Kilobot robots start out in a tight grid-like group, before those not required to form a certain pattern disperse to leave the desired shape. Doing this requires a coordinated system in which the robots are able to determine a plan of action, based on a single overhead light, which they follow.
Impressively, much like the aforementioned example of birds or fish, they are able to do this despite only being able to communicate with robots up to three body lengths away — so that each robot can only communicate with a maximum of 36 other robots at any given time.
“Shape formation is an important problem in multi-agent systems,” researcher Melvin Gauci, a postdoctoral fellow in the Self-Organizing Systems Research Group, told Digital Trends. “It is a challenging, multifaceted problem that requires high degrees of autonomy, and is therefore a good test-bed for integrating atomic algorithms into higher-level behaviors. In this case, the atomic behaviors include self-organized coordinate system formation, consensus, and random and light-based motion.”
According to Gauci, one possible real-world application of this work is in building multi-robot systems that are able to assume a desired formation in order to adapt to its changing environment.
“Further down the line, the vision is to scale these systems down in size to achieve programmable matter where a user will be able to create a tool or part on the fly from a ‘bucket’ of robotic ‘atoms,’” he said.