
While working on the design of OceanOne, the team at Stanford always knew they wanted to develop a system that allowed the robot to function collaboratively with a human driver. The idea was that no robot, no matter how smart, could possess the same kind of care and skill as a human diver — that is, unless a human is the one carefully guiding the robot. About five feet long from end to end, OceanOne boasts stereoscopic vision built into its “head” that’s capable of transmitting exactly what it sees back to its operator. Additionally, the operator has fluid control over two articulated arms.
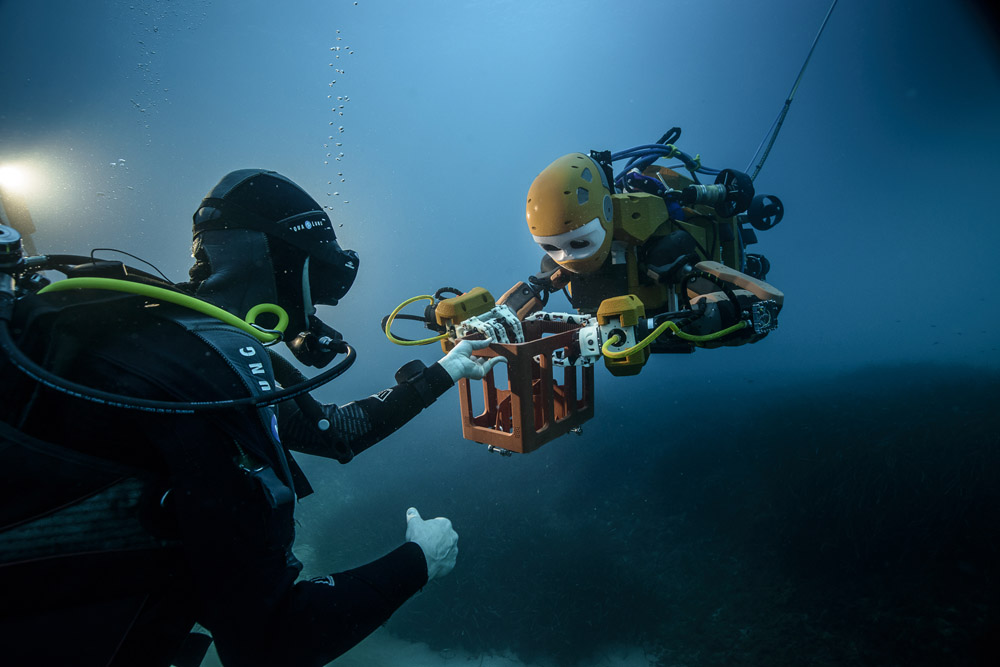
Though the entire robot is an impressive piece of engineering, perhaps the most noteworthy part of OceanOne is its innovative hands. Designed specifically to work with delicate coral reef or the perishable remains of shipwrecks, each hand features force sensors that transmit haptic feedback to the robot’s pilot. Because of this, the driver can feel exactly what OceanOne feels, helping determine if it’s grabbing something dense or delicate. In the future, Stanford says each finger will be fitted with tactile sensors that will also work to inform the robot’s built-in brain.
“You can feel exactly what the robot is doing,” said Stanford professor Oussama Khatib. “It’s almost like you are there; with the sense of touch, you create a new dimension of perception.”
To give the robot an inaugural whirl, Khatib and the team traveled to the Mediterranean Sea to plunder the ancient wreckage of La Lune. OceanOne deftly navigated the shipwreck (located some 330 feet underwater) and eventually grabbed what appeared to be a grapefruit-sized vase. After examining the vase and deciding to bring it to the surface, Khatib piloted the robot over to the team’s recovery basket, softly placed the object inside, and shut the lid. The basket was then brought above water, and Khatib and the rest of the team became the first people in hundreds of years to handle the vase thanks to the innovative OceanOne robot.

“OceanOne will be your avatar,” Khatib said. “The intent here is to have a human diving virtually, to put the human out of harm’s way. Having a machine that has human characteristics that can project the human diver’s embodiment at depth is going to be amazing.”
Amazing indeed, and likely the future of ocean exploration, OceanOne represents the perfect harmony of AI and human interaction. Though Khatib helped in navigating the robot through La Lune’s wreckage, the bot itself can also search completely on its own. All the sensors loaded into OceanOne enable it to consistently monitor surrounding current and turbulence and allowing it to turn on its thrusters accordingly to stay in one spot. Built-in quick-firing motors even allow the robot’s arms to stay steady while working, making it even better at handling sensitive materials.
“We connect the human to the robot in [a] very intuitive and meaningful way. The human can provide intuition and expertise and cognitive abilities to the robot,” Khatib said. “The two bring together an amazing synergy. The human and robot can do things in areas too dangerous for a human, while the human is still there.”

With successful testing complete, the team plans on bringing OceanOne back to Stanford University for further work on the platform. As of now, OceanOne is — as its name implies — the only such humanoid diving robot. However, Khatib hopes to manufacture more in the future in order to create an entire fleet that could work together during future dives. Aside from Stanford’s participation, the OceanOne was developed in partnership with Meka Robotics and Saudi Arabia’s King Abdullah University of Science and Technology.
Editors' Recommendations
- Tesla’s Optimus humanoid robot can now dance like Elon Musk
- Apptronik’s new humanoid robot is a rival to the Tesla Bot
- Watch Elon Musk unveil Tesla’s advanced humanoid robot



