
Nissan has partnered with the Japan Agency for Marine-Earth Science and Technology (JAMSTEC) to develop remotely operated vehicles that will be used to search the sea bed for natural resources. Specifically, the automaker is providing its Around View Monitor (AVM) technology to help the robot rock crawlers navigate the sea floor more safely.
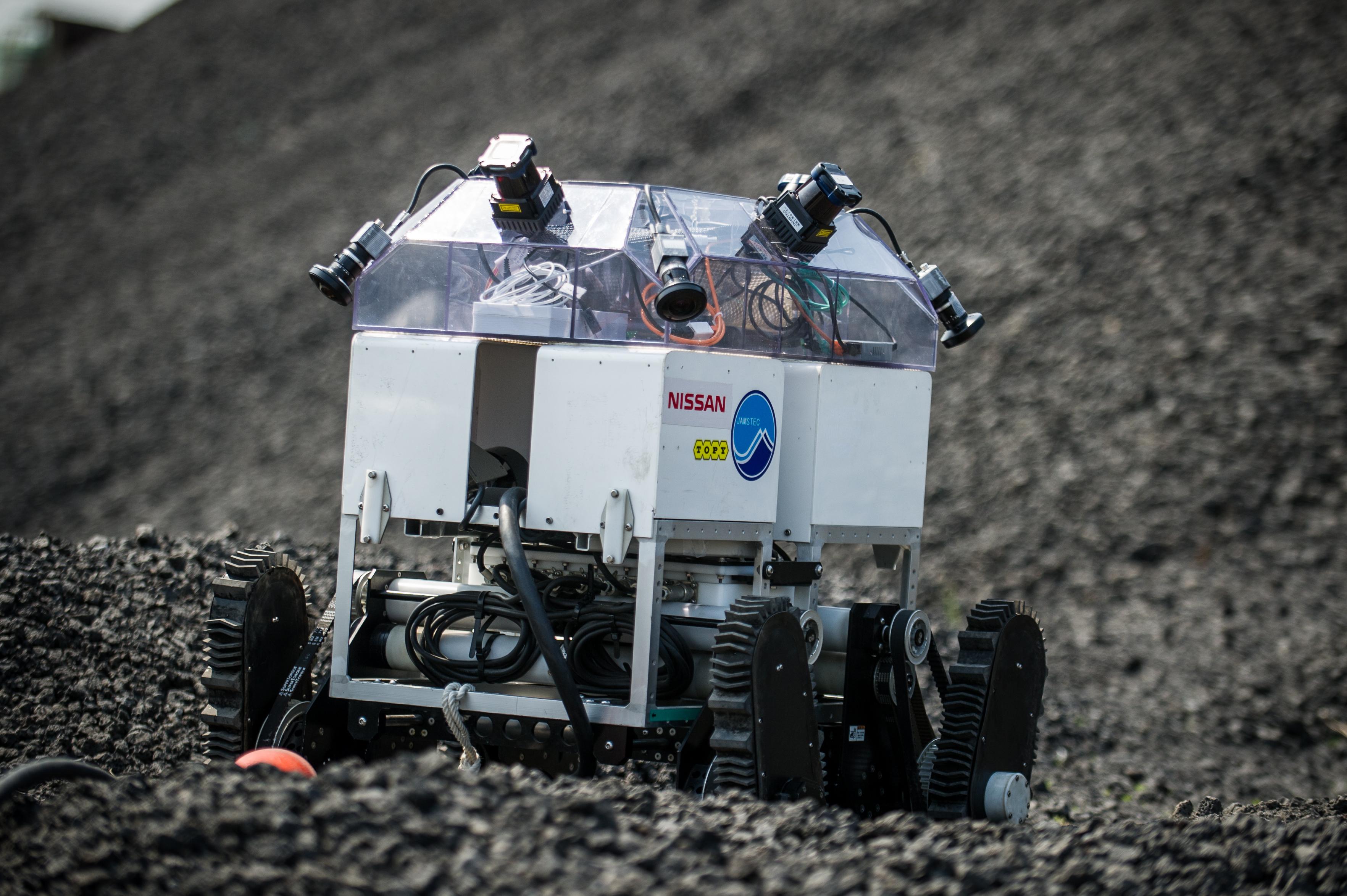
What the AVM does on cars like the Nissan Juke, Qashqai, and X- trail is provide a 360-degree overview of the car, simulating a bird-s-eye view. This helps drivers avoid obstacles in tight maneuvers or tricky parking situations. For the ROV’s, the AVM function the same way but will also have a new 3D rendering capability that will display the immediate topography around the vehicle.
This will allow the ROV operator to better measure distances while roving, improving situational awareness and subsequently the efficiency of undersea searches.

Above sea level, Nissan’s AVM tech is a large part of the autonomous drive tech that the company is developing to provide more mobility options for the drivers and minimize traffic incidents. This includes integration with Nissan’s Moving Object Detection that became a part of the system in 2011.
Nissan is expecting to roll out autonomous driving on the road by 2020. It just goes to show that much of the technology automakers develop has potential in so many other applications. While some may see parking cameras as a gimmicky gadget that they’d rarely use, others saw it as a potential game changer in science exploration. Nissan should definitely get a tip of the hat for this one.
Editors' Recommendations
- Nissan wants the 2023 Ariya to be its comeback EV, but the bar has been raised
- Nissan employs certified smellers to check the odor of its new cars
- Nissan’s Z goes back to the future with retro styling, modern tech
- Eufy slips twin-turbine tech into its RoboVac L80 robot vacuum
- Mayflower Autonomous Ship is headed to sea to test its self-driving boat tech



