
In the Indiana Jones movies, the titular hero uses his trusty bullwhip for a variety of tasks — from punishing evildoers to pulling levers from across the room to moving objects at a distance. That same idea — minus the evildoers part — is now driving researchers at Texas A&M University, who recently published a paper on a robot that uses a “compliant, unactuated tail to manipulate objects.”
“There has been an increasing amount of interest in robots that don’t look like the stereotypical rigid, Wizard of Oz Tin Man-style machine,” Dylan Shell, associate professor of computer science and engineering, told Digital Trends. “In my lab, we’ve were thinking a lot about everything you can do with a flexible structure. I thought of this particular mechanism while I was tying my shoelaces. If you look around you, there are a lot of tools that humans use which depend on rope, twine, strings, and tools of that nature.”
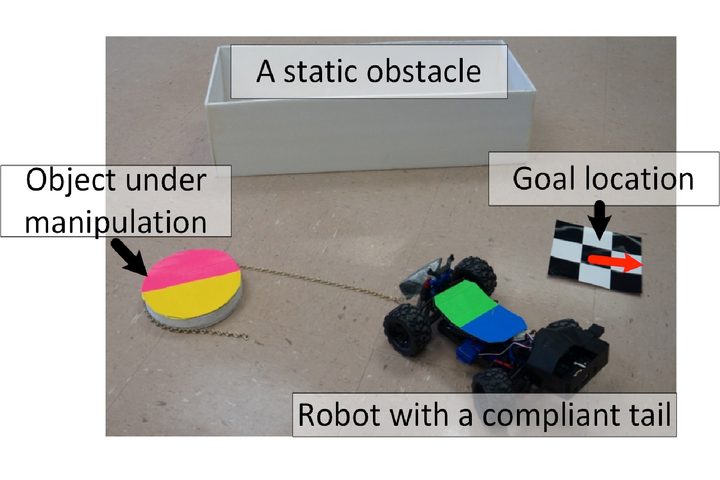
Working with Ph.D. student Young-Ho Kim, Shell attached a bullwhip-inspired “flexible rope-like structure” to a remote control car to investigate its various use cases. The concept explores the mathematical properties of such tools, which requires working out data concerning tension and mass in real time — and figuring out how to use them to move objects through either harsh whipping movements or slower dragging ones.
“The idea was to have a tail which, depending on how fast you move, can either be flexible or somewhat rigid, and you can play with that dynamic,” Shell said. “Our paper concerns the reasoning about how to use such an appendage. If you’re trying to get an object from point A to point B as quickly as possible, you can use a combination between coarse and finer movements to move it. The robot is able to optimize that route planning to take advantage of its different abilities.”
Going forward, Shell plans to explore concepts like multiple robots working together, with the ability to combine different tails in order to carry out conjoined collaboration tasks. “It would be possible scoop up objects, for instance,” Shell said.
Right now, there are no immediate plans for this unique robot to find its way into the real world. But who knows? With octopus and worm robots all the rage right now, who’s to say a bullwhip-inspired machine isn’t the next big thing?
“I think this could certainly be a flexible tool in both senses of the word,” Shell concluded.



