There was once a time, in the early 1990s to be precise, when the biggest impediment to achieving high-end virtual reality was the fact that the images were too fuzzy and slow-moving. Today, we’ve moved way beyond these early teething challenges. With impressive visuals and three-dimensional sound, VR has no problem creating a compellingly immersive experience — from an audio-visual perspective, at least.
But virtual worlds aren’t yet as convincing as they could be — and the lack of other senses, predominantly touch, is a big part of it. Touch is a key part of the way we interact with the physical world. Our eyes can tell us part of the story, but it’s touching the objects around us that really sells the experience.
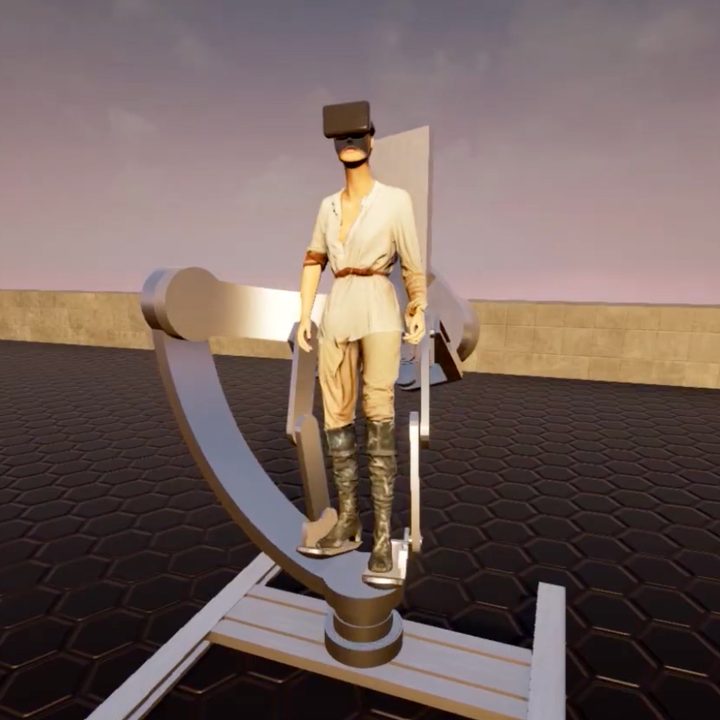
Marcel Reese, the brain behind a Germany VR exosuit project called Holotron, thinks he may have come up with a solution to satisfy this part of the virtual experience. It’s a lower-body robot exosuit (think half of the Power Loader from Aliens) that can be donned by users, which is able to simulate some of the forces needed to help them more compellingly move through virtual worlds and interact with objects around them.
A virtual world that’s indistinguishable from life
“The problem I tried to solve with the Holotron is how to create a virtual world that is indistinguishable from real life,” Reese told Digital Trends. “That can also be understood as finding the perfect man-machine interface where you control the avatar by doing what you would normally do.”
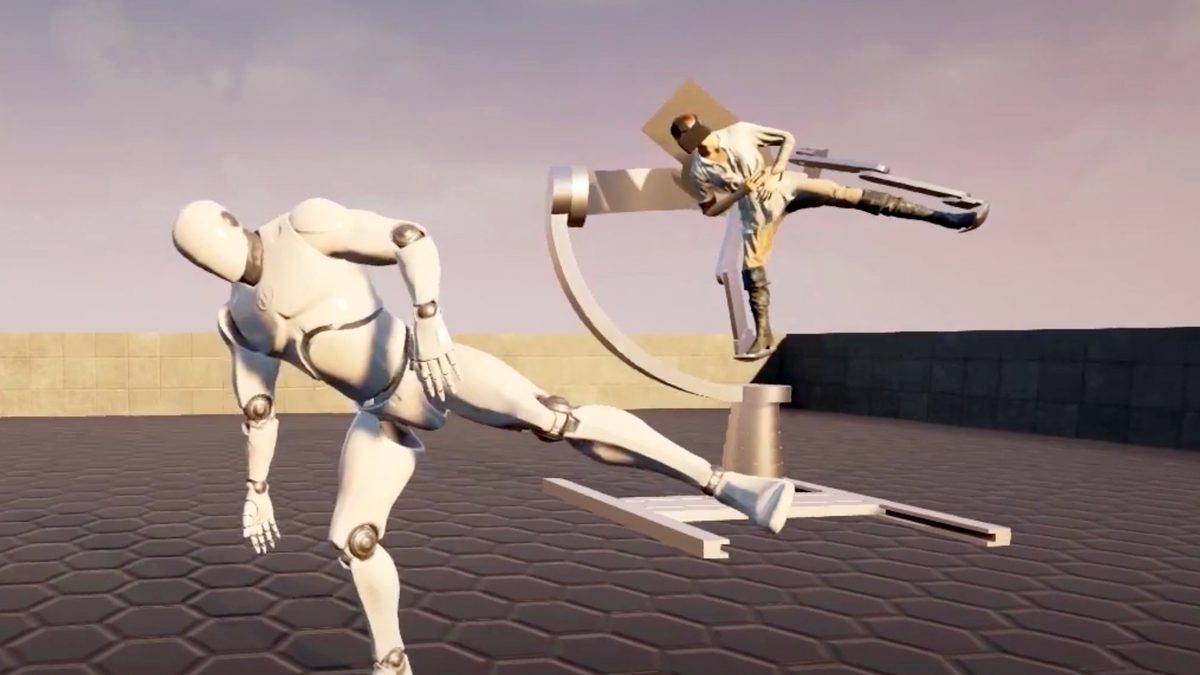
The force-feedback interface of the Holotron exoskeleton works by measuring the forces the user is exerting, then sending this to a computer where the avatar in a virtual world recreates them using what Reese called “virtual muscles.” Depending on the physical constraints of the virtual environment, this will allow the avatar to move or not. For instance, if the avatar’s leg pushes against a small ball with a large force, the ball will yield as the user executes a kick. If a similar motion is attempted on a heavy rock, the rock will not yield and the exosuit could constrain the user’s leg movement.
But no-one, except perhaps the biggest soccer penalty shootout enthusiast, dons a robot exosuit solely so that they can kick a ball in VR with added verisimilitude. The really big challenge in terms of movement in VR remains how to allow users to walk without being stopped by the physical, real-world environment the user is in. Other researchers have explored solutions that range from treadmills to a weird trick that fools the brain into thinking it’s heading in a straight line when, in fact, it’s walking in circles.
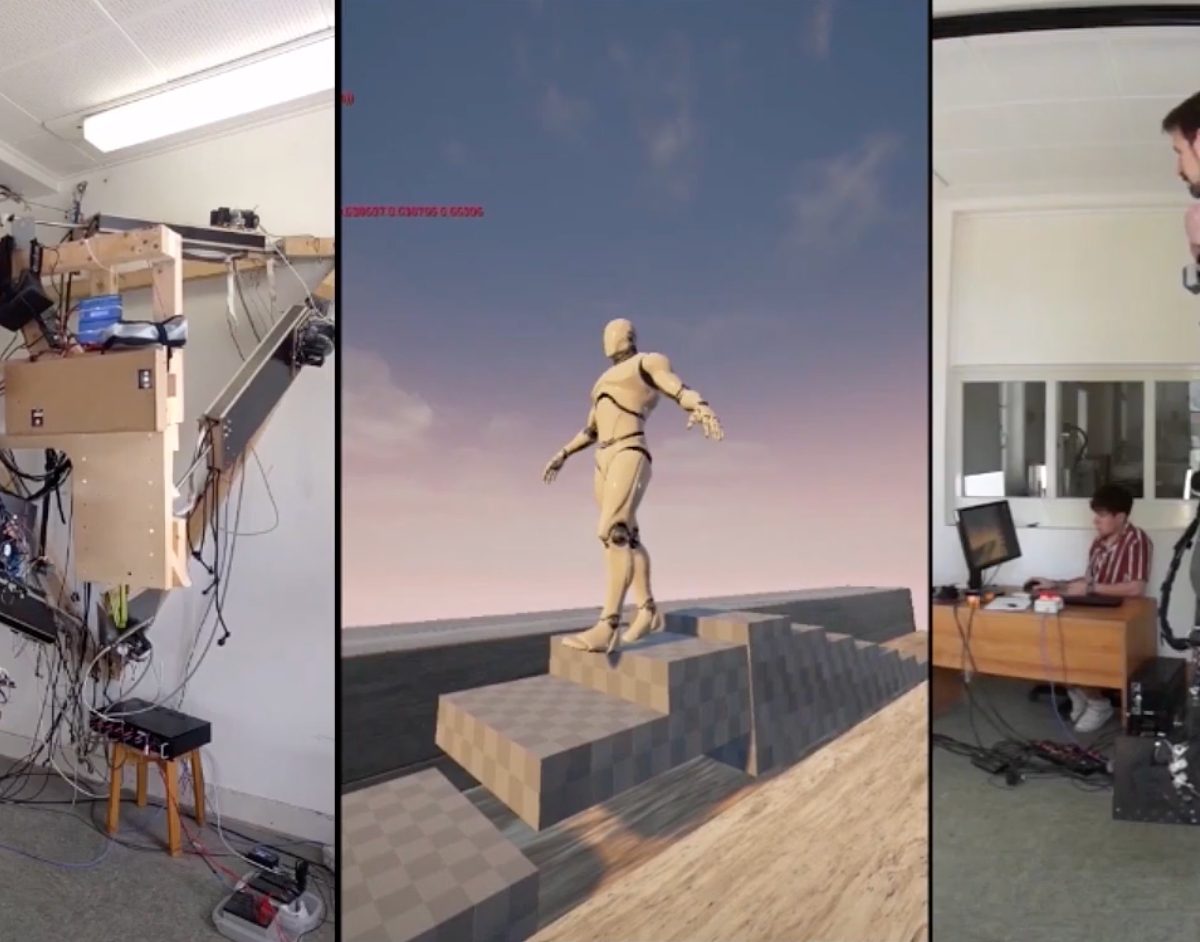
In the case of Holotron, the approach involves a larger robot called the motion simulator which suspends and moves the exoskeleton (and, by extension, the user) in the air. The user remains stationary, but the Holotron setup provides the necessary movement to let them feel like they’re, well, moving.
“The user is not walking on a real floor anymore, and instead feels the virtual floor only through the footplates of the exoskeleton or other body parts if [he or she] might be crawling,” Reese said. “It is important that the user never has not to bother about regulating his or her own body balance. With the Holotron the user can fully concentrate on controlling the body of the avatar.”
Reese said that possible applications for this more immersive VR setup could range from gaming to job training. While regular walking is an immediate focus, the technique could be (and, in early test versions, is) used for other movement types such as crawling, jumping, climbing, riding, swimming, base jumping, surfing — or even spending time in microgravity in space.
Could control telepresence robots, too
Intriguingly, he also envisions this hardware setup becoming a useful tool for controlling telepresence robots, a concept that is already starting to be utilized (not necessarily with this specific tech) for applications up to and including life-saving surgery.
“There are many applications to remotely operated humanoid robots,” Reese said. “This includes hazardous environments, remote industrial repairs, remote medical services, or simply remote work in general, where anyone could work anywhere instantly. A lot of common travel and commute could be reduced by using teleoperated humanoid robots.”
Reese’s ambitions in this space are just getting started. “The [fine] details of … interaction with the virtual environment, like the texture of a rough piece of wood or the bumps of an avocado, cannot [yet] be felt realistically by the user,” he said. “In the beginning, that is not required … But one can add high-resolution tactile displays all over the body to have the user feel the very details of every object he or she touches. Later add-ons will include this and also thermal displays, smell and taste.”
He said that the plan is to eventually commercialize the Holontron, although currently, it is too early to consider doing this. Nonetheless, this gives a flavor of what the future of virtual reality could look like. At least, so long as you’ve got plenty of space in your home gaming room.