


Pay a visit to the Chicago River this summer, and you’ll find that it has an intriguing new addition to the local wildlife. Amongst the myriad birds, fish, and occasional beaver or otter, keen-eyed visitors may spot a small robot, resembling a raft not much larger than a child’s kickboard, meandering lazily up and down the busy waterway. This is Trashbot, the creation of a Chicago-based startup called Urban Rivers, a collective of public-minded ecologists, roboticists, and assorted other “ists” using cutting-edge technology to clean up refuse in the area.
In some ways, Trashbot resembles a waterborne version of the Roomba, the autonomous vacuum cleaners found in a growing number of American homes. But it isn’t. While its free-roaming movement, and lack of onsite handlers, may give the impression that this is a self-driving vehicle, this could not be further from the truth. At any point in time, Trashbot might be controlled by one of approximately 4,383,810,342 people, the current estimated figure for the global total of internet users.
Thanks to recent technological advances, not least the ubiquity of internet access around the world, anyone with a web connection can log onto Urban Rivers’ website and take a two-minute turn at piloting Trashbot. The company’s goal is to use this time to direct Trashbot to pick up trash in its immediate vicinity, and then ferry this to a collection point on the river bank, where it can be later removed.
“We’re at the stage where we have really fast bandwidth in most places,” Nick Wesley, one of the brains behind the project, told Digital Trends. “The technology used for [building our robot] is derived from what you’d use for building a cheap drone. It’s also now possible to stream video with real low-latency. That perfect storm enables really interesting remote presence projects in environments just like the Chicago River. Taking advantage of this, letting people take control of a robot to clean up trash, makes for a really cool experience.”
Building Trashbot
The idea for Trashbot started a few years ago with Urban Rivers’ previous project. In June 2017, the organization successfully created “floating gardens” on the Chicago River with the goal of restoring natural wildlife habitats. Unfortunately, the team quickly realized that the gardens got clogged up with trash. To solve this, they started recruiting old-fashioned human litter pickers to meet at the Chicago River in the morning and manually collect debris from the river. However, this turned out to be ineffective, largely because of the erratic flow of the Chicago River.

“What we’d find is that people would go out in the morning and there would be no trash to collect,” Wesley continued. “Then something would change [with the flow of the river] and suddenly the trash would move in. We realized that we needed a solution that was ‘always on,’ that would allow us to remove trash in real-time as it flows past.”
“We figured that we could put out a call so that this remote-control boat could be controlled by people [around the world]”
The idea of a robot boat was born, but the team wasn’t sure how to pilot it. Computer vision and image recognition technology has come on in leaps and bounds in recent years, but teaching a computer to understand what constitutes trash isn’t easy. Trash is a somewhat abstract concept, for which most of us would apply the famous Supreme Court Justice Potter Stewart description of obscenity: We know it when we see it. At this point they decided to turn to the internet for help.
“We figured that we could put out a call so that this remote-control boat could be controlled by people [around the world],” he said.
Trashbot is due to go live by the end of this month, and should in near continuous operation in June. While you won’t be able to try it out for yourself until then, prospective users can get an idea of how it will work by checking out an online demo in a test pool (or, as it’s somewhat grandiosely titled, an “underground aqua-lab”) filled with rubber ducks. Created by many of the same team members behind Trashbot, this demo provides anyone with an internet connection the opportunity to take their own own personal (for at least a few minutes) trash pickup robot for a spin.
As concepts go, it’s pretty simple — and that’s what makes it great. But focusing on the robot part of the project is, in some ways, missing the point. The robot is simply the last stage of the process, the end effector that allows the robot to carry out its trash-picking goal in life. The really exciting part of the initiative, the bit that has the opportunity to help change the world, is in the harnessing of the online crowd.
The power of the crowd
The idea of drawing upon the general public to solve big problems is nothing new. In 1715, an astronomer and mathematician named Edmond Halley (after whom the famous Halley’s Comet is named) published a map predicting the timings and path of a forthcoming solar eclipse. Because Halley could only be in one physical location at the time of the eclipse, he issued a plea to members of the public. His “request to the curious” asked that they would record details of the eclipse, “especially to note the time of continuance of total darkness.” This crowdsourced data was immensely helpful to Halley. Using the publicly gathered information, he went on to produce a second, more accurate map, which helped predict a later 1724 eclipse.
What today’s technology adds to this idea is the concept of interactivity. No longer limited to simply getting the public to gather and hand over data, it’s now possible to let the interested masses get more heavily involved with work. In 1991, nearly 300 years after Halley’s crowdsourcing initiative, a man named Loren Carpenter, the co-founder of Pixar, staged a memorable demo at a top computer graphics conference. In a pioneering showcase of the power of the crowd, he showed how people in attendance could be harnessed as individual nodes to solve problems.
The “problem” he chose was getting a room of 5,000 individuals to play one combined giant game of Pong. Each member of the audience was given a paddle, with one side colored green and the other side red. At the front of the room was a giant theater-sized screen displaying the classic video game, along with a computer which scanned the audience to determine whether the red or green side of each paddle was being held up. Each paddle held up by an audience member represented a single vote (move up or move down) in a larger democratic decision regarding how the game was played. This information was then translated into information which moved the giant virtual paddles of the Pong controller to bat the on-screen “ball” across the virtual tennis court.
The internet takes up this powerful idea of group control, but applies it to a group far beyond 5,000 people
The internet takes up this powerful idea of group control, but applies it to a group far beyond the 5,000 people present at SIGGRAPH or the hundreds who helped Edmond Halley. It’s this kind of mass collaboration which has led to the emergence of internet-era crowdsourced creations like Wikipedia, Linux, and even the giant-sized hyperlinking behind PageRank, the near $1 trillion algorithm which kickstarted Google.
However, too often today the crowd is viewed in negative terms: as a disembodied rabble for carrying out insidious acts like large-scale online harassment of individuals on Twitter. The likes of Nick Wesley and the Urban River crew want to help change that. And they’re far from alone.
Saving the Zooniverse
Chris Lintott is a Professor of Astrophysics in the Department of Physics at the U.K.’s renowned University of Oxford. Twelve years ago, Lintott was working on a project with a student, which involved analyzing the shape of galaxies. Like spotting garbage on the Chicago River, this was a task better suited to human classification skills than machine intelligence. But after classifying 50,000 galaxies, the student came to the realization that they needed help.
“We created a website which asked members of the public to help us with classifications of galaxies,” Lintott told Digital Trends. “You didn’t need to know what a galaxy was or to have any previous interest in astronomy. But people flocked to the site, and provided what turned out to be hundreds of millions of classifications.”
It proved to be a revelation, especially once word got out about the project. “We started to get contacted by other researchers who were drowning in their own data for everything from biomedical imaging projects to other astronomy projects to things in the humanities and social sciences,” he continued. Like a Kickstarter for research, Lintott went on to help found Zooniverse, a platform where researchers can crowdsource help from the public for a number of large research challenges too big for just a few scientists.
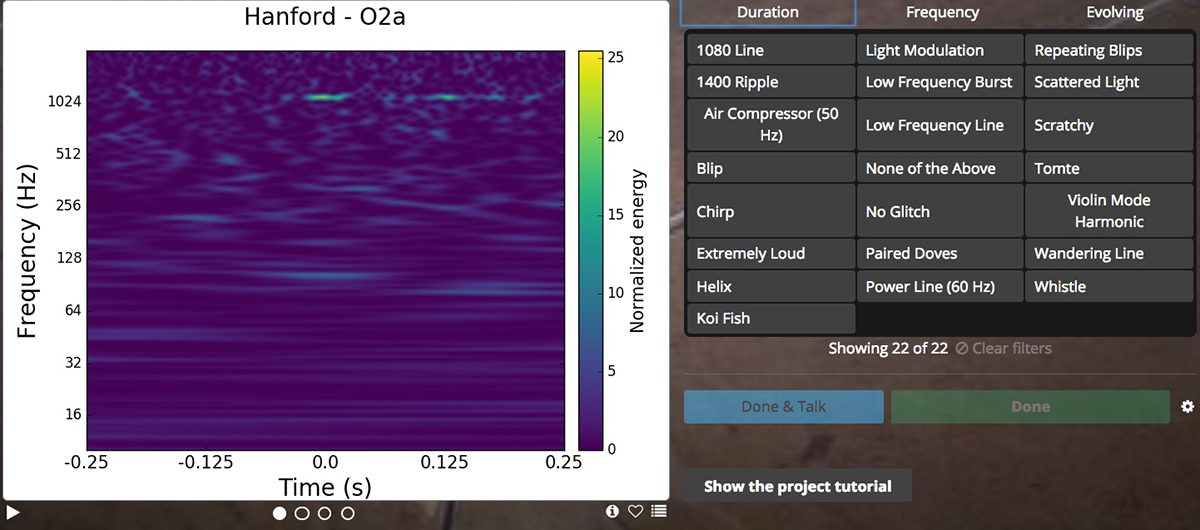
One such project, Gravity Spy, requested help from volunteers in distinguishing between gravitational waves, the “elusive ripples of spacetime,” and glitches in the data gathered by laser interferometers. To date, more than 1.2 million such classifications have been made. Another, called Planet Hunters, asked people to sort through data from NASA satellites in order to discover new planets. More than 100 have been discovered so far. “I find it mind-boggling to think that, 20 years ago, no-one had discovered planets around other stars,” Lintott said. “Now it’s something that you can do with a web browser.”
Many projects on the platform are decidedly more earthbound — but no less remarkable for it. When Hurricane Irma devastated several Caribbean islands in 2017, a group called the Planetary Response Network used Zooniverse to put out a call to the public. Their request? To help trawl through satellite images of the region to create maps for rescue workers, showing them which roads were blocked, which buildings had been damaged, and even where groups of refugees were gathering. The results were invaluable as a first response tool for aid workers arriving in the region.
The triumph of the connected commons?
Crowdsourced projects are not always going to be the answer to big global problems, of course. Solving giant problems is not something that can necessary be decentralized, gamified (in the sense of picking up trash with a robot), or distributed among the lay public. Books such as Carl Honoré’s The Slow Fix: Why Quick Fixes Don’t Work and Evgeny Morozov’s To Save Everything, Click Here take issue with what Morozov terms the culture of solutionism. This is the belief that any and every issue the world faces can be solved with the right app — or, we suppose, the right trash-picking river bot.
“You have to make the mode of interaction meaningful and real”
But, as Trashbot and Zooniverse prove, there are big problems which can be tackled (or, at least, assisted) in this way. These are typically tasks which have one centralized communicable vision, but which are divisible into bite-sized chunks that nonetheless offer the ability for people to make genuinely meaningful contributions.
“You have to make the mode of interaction meaningful and real,” said Lintott. “You can’t just get people to fill in forms and send them off. But if people are made to feel like they’re a real part of the process and you’ll find that people are willing to put a huge amount of effort in.”
The influx of incoming new technologies, such as drones and other robots which offer different perspectives on the world, will only make this space more interesting. The same is true for cutting-edge VR tools which make it possible to experience not just the images of a place, but also its sounds, tastes, smells, and textures, from anywhere on the planet.
In doing so, projects such as these may help boost civic engagement, by making people more engaged in caring for their immediate surroundings as well as places much further afield. It’s certainly preferable to the trend for “slacktivism” or “clicktivism,” which lets people feel good about doing the right thing simply because they’ve “liked” the appropriate page on Facebook. (Although, just like clicktivism, initiatives such as Trashbot do allow you to act from the comfort of your sofa, while still wearing your pajamas.)
“I think that this type of remote presence technology is an extremely useful tool when it comes to building an experience around something that you may not see from where you live,” Nick Wesley said. “When someone finds something or explores something on their own, it really does make them more invested. We’re just getting to the point where this kind of thing is feasible. I think that’s really cool. There are lots of different fields which can use this approach to solve some really big problems. As we start to increase the level of interaction, this is only going to get more exciting.”



