
In February, we wrote about an impressive insect-inspired robot which scuttled around at impressive speeds like a cockroach on Red Bull. As it turns out, the team responsible for the robot aren’t capable of sitting still either — since they’re already back with one doozy of an update, granting their insect-bot the amazing newfound ability to walk on (and under) water as well as it can on land.
In nature, cockroaches have the ability to survive underwater for up to half an hour. The team behind HAMR (Harvard’s Ambulatory MicroRobot) were therefore keen to add similar functionality, both to mimic the robot’s real-world inspiration and also to open up new potential applications.
“There are two parts for achieving ‘walking on water,’” Kevin Chen, a postdoctoral fellow at the Harvard University’s John A. Paulson School of Engineering and Applied Science, told Digital Trends. “First is supporting the robot’s weight via surface tension, and the second is moving on the water surface via asymmetric paddling.”
To support the robot weight on the water surface, the robot takes advantage of a force called surface tension. When the miniature bot sits on the water surface, it sinks slightly, causing a minor deformation in the water surface, which generates enough upward force to support the robot’s weight.
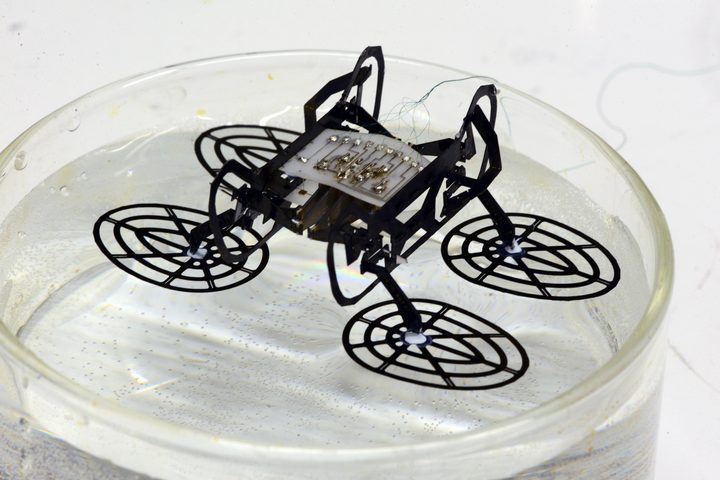
The asymmetric paddling part of the robot’s movement is inspired by the flap-like appendages on the legs of a diving beetle. This swimming motion involves the insect (and now robot) opening these flaps and pushing back on the water to generate forward thrust, before retracting the flaps.
“I would go for search-and-rescue and exploration,” Chen said, describing possible real-world applications. “Think about a scenario in which a building collapsed due to earthquake or tsunami. There are many people trapped in confined and cluttered environments. We can send in a swarm [of hundreds] of these small robots into the site to search for survivors. These robots should be able to overcome obstacles on land. In addition, when facing water puddles, the robots need to bypass these by walking on the water surface or dive down to avoid obstacles on the water surface.”
Going forward, the team plans to put batteries and sensors on board, while further increasing the vehicle payload. The researchers are also interested in adding climbing and jumping functionality. Chen predicts this process will take around five to 10 years.
“We are working under the Wyss Institute at Harvard University, which places an emphasis on translating research into commercial products,” he said. “We are very excited and interested in commercializing this technology because it has many potential applications.”
A paper describing the work was recently published in the journal Nature Communications.



