
“Choose a job you love, and you will never have to work a day in your life.” The quotation, apocryphally attributed to Confucius, appears in the email signature of Andreas Nuechter, a professor of robotics and telematics at Julius-Maximilians-Universität of Würzburg (JMU) in Germany.
Nuechter is leading a project to build a rolling robot he hopes will be used to explore a system of hidden lava caves on the moon. The spherical robot, which looks a bit like BB-8 from the new Star Wars movies, is called DAEDALUS, an acronym that stands for Descent And Exploration in Deep Autonomy of Lunar Underground Structures.

Nuechter loves his job. But building an entirely new kind of robot that will use lasers to semi-autonomously map a hitherto unexplored part of the moon is most definitely hard work, whatever anyone says. However, thanks to researchers from JMU, Jacobs University Bremen GmbH, University of Padova, and the INAF-Astronomical Observatory of Padova, it might just be possible.
Exploring the moon’s underground cave system
“The European Space Agency is highly interested in exploring the lava tubes on the moon,” Nuechter told Digital Trends.
A little over a decade ago, in 2009, the Japanese spacecraft Kaguya spotted something interesting during a flyover of the moon’s Marius Hills region. What initially looked like a deep crater appeared, on closer inspection, to be a hole. This cavity — which Nuechter estimates is a pit in excess of 100 feet deep — is believed to be a lava tube, created by lava billions of years ago, now empty. At the bottom of this hole, so the theory goes, is a system of tunnels forming a cave network under the lunar surface. Similar lava tubes, bearing a diameter of approximately 32 feet, have been found on Earth in places including Lanzarote, Iceland, and Hawaii. “People can definitely stand up and walk there,” Nuechter said. “It looks basically like a big cave.”
Exploring that cave network beneath the Marius Hills skylight is what DAEDALUS is designed to do. “Lava tubes are particularly interesting since they could actually provide, in the far future, shelter to humans from radiation and all the nasty effects you have on the moon,” explained Nuechter. “If you plan to live on the moon, it would make sense to use the existing geologic structures to go underground.”
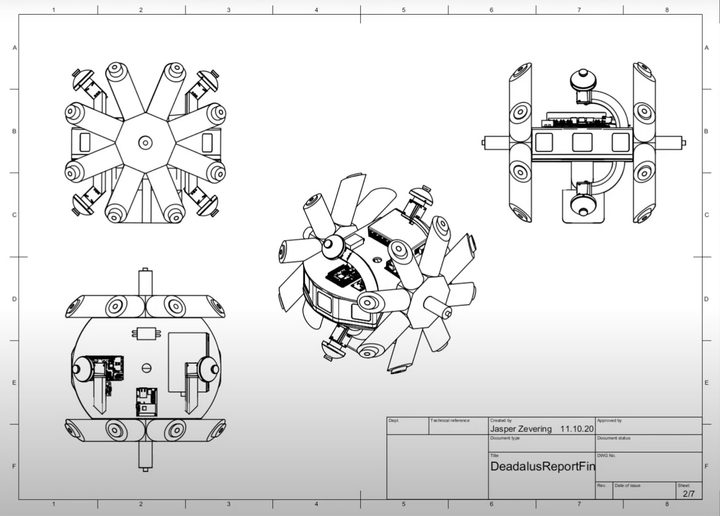
Rather than use a conventional rover, the plan for DAEDALUS is to use a 46-centimeter, transparent spherical robot in which the scientific instruments, such as the sensors and power supply, are contained in a protective sphere made of a material like plexiglass. It would move by rolling, with motorized components inside that are able to shift the center of mass. Alternatively, or possibly additionally, the researchers are exploring a series of “sticks” that could protrude from the robot’s shell to push it, the way a rowboat might use oars to propel it away from the shore. These could also be used like a tripod to anchor the robot in one place when needed.
The idea is that the robot could be lowered, along with a Wi-Fi receiver, into the lava tube pit by way of a lightweight crane that’s also being developed as part of a European Space Agency project. Once at the bottom, it would then use cameras and lidar sensors to scan its surroundings in order to create a three-dimensional map. “The drawback of cameras is that you need an external light,” Nuechter said. “Either you need the sun, or you need a light bulb. But lidar is completely independent of [that requirement].”
Controlling DAEDALUS
Nuechter said he wasn’t sure how extensive the cave network might be. “We don’t know,” he said. “We are very curious. All I can say is that we plan with these laser scanners to be able to look up to [650 feet.] That would be the visibility range of the DAEDALUS. We also plan to be able to move to explore the environment.”
Lava tubes on Earth can be sizable. One in Iceland is 100 feet wide, 33 feet high, and extends almost 4,500 feet, with the main tunnel alone being the best part of 3,000 feet long. In science journalist David Whitehouse’s non-fiction book Space 2069, he writes that lunar lava tubes could conceivably be “large enough to house cities. Such tubes could provide shelter for a future moon base.”
DAEDALUS will be partly autonomous in its operation. Due to the time it takes for a radio signal to travel to the moon from Earth, the notion of direct supervision is out of the question. “If you cannot do direct supervision due to the delays, and there is something like a delay longer than 300 milliseconds, then you need to come up with something else,” Nuechter said. That “something else” will be a hybrid control system whereby the human operator will specify broad commands (“go to x coordinates and take y pictures”), and then the robot can take certain autonomous actions to figure out the intermediate steps.



The DAEDALUS project is still a work in progress, yet to be given the official go-ahead by the European Space Agency. It is likely that it will not be deployed for another decade. However, Nuechter said he is confident the technology will be ready to go a lot sooner than that.
“We believe this is realizable with today’s technologies, we do not have to wait something like 10-15 years,” he noted. “I’ve been [working in this field for] something like 20 years, doing research into robotics and laser scanning mainly. In those past 20 years, robotics and laser scanning have advanced a lot to the point where the type of mission we’re proposing has become feasible.”



