As future locations to explore in our solar system go, some particularly exciting options are worlds with subsurface oceans. Places like Saturn’s moon Enceladus and Jupiter’s moon Europa are both thought to host liquid oceans beneath thick icy crusts, which makes them intriguing places to explore and even to look for potential evidence of microbial life. But how do you design a robotic system for exploring a freezing cold ocean on a distant moon?
One idea from NASA’s Jet Propulsion Laboratory is to use a swarm of tiny swimming robots, working together in a concept called Sensing With Independent Micro-Swimmers (SWIM). These robots, which NASA describes as cell phone-sized and wedge-shaped, could be carried in a group by a single probe and so take up very little room in a spacecraft. The probe could then make its way through the icy crust by melting it away, and the robots are released into the water.
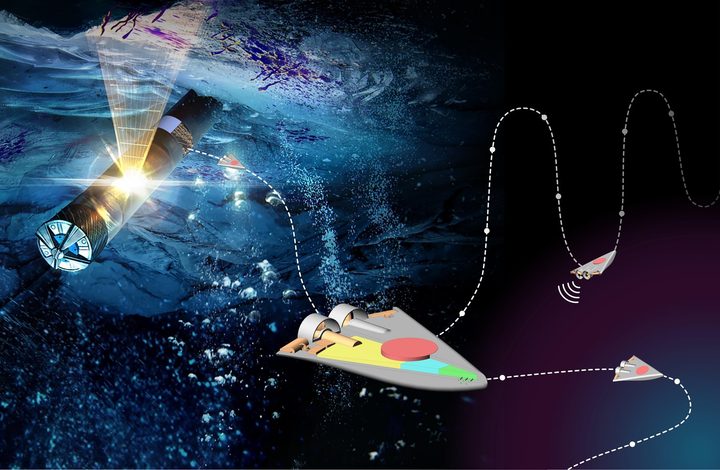
“My idea is, where can we take miniaturized robotics and apply them in interesting new ways for exploring our solar system?” the originator of the idea, JPL’s Ethan Schaler, said in a statement. “With a swarm of small swimming robots, we are able to explore a much larger volume of ocean water and improve our measurements by having multiple robots collecting data in the same area.”
The robots would communicate with the probe, which would stay connected to a lander on the surface by a physical tether. That means the probe wouldn’t be able to move much so the robots could explore instead.
“What if, after all those years it took to get into an ocean, you come through the ice shell in the wrong place? What if there’s signs of life over there but not where you entered the ocean?” said SWIM team scientist Samuel Howell. “By bringing these swarms of robots with us, we’d be able to look ‘over there’ to explore much more of our environment than a single cryobot would allow.”
Having multiple robots would allow them to cover more areas of the ocean and explore more widely, but it has a feature that is even more important. It reduces risk, as if one or several robots are destroyed, the mission can continue without them. This is particularly valuable when exploring a new environment for the first time, as it is extremely difficult to predict what dangers there might be to explorers there.
The SWIM concept has recently been awarded funding for further development under NASA’s Innovative Advanced Concepts (NIAC) program.