
When you think about big problems technologists are working to solve, the first thing that comes to mind probably isn’t wiping out a species of invasive predatory fish. But maybe it should be, because here at Digital Trends we previously covered a surprising number of tech solutions to the lionfish problem — ranging from smart apps to a vacuum-inspired approach which sucks up the poisonous fish using jets of water. Now students at Worcester Polytechnic Institute (WPI) are working to develop an underwater robot capable of autonomously hunting and harvesting these creatures.
Lionfish represent a major problem in places like Florida’s Atlantic coast, where they arrived a quarter-century ago. Their venomous dorsal fins can trigger pain, nausea, and breathing difficulties in humans. More crucially, however, they have enormous appetites and are capable of rapidly diminishing local fish populations. They also breed at an astonishing rate, with females able to lay around 30,000 eggs every four days.
The robot developed at WPI consists of a computer vision system and lionfish harvesting tech. The computer vision system uses a TensorFlow neural network to recognize lionfish.

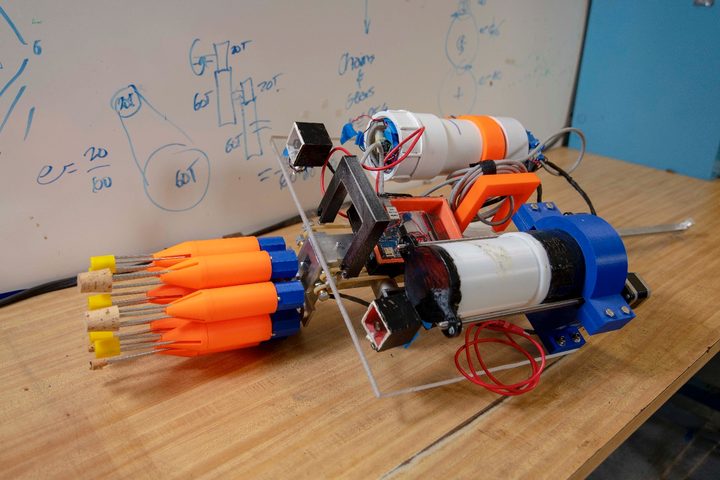
“The prototype harvesting system has a single spear shaft and a revolving piece that holds eight spear tips,” Craig Putnam, senior instructor in Computer Science and Associate Director of WPI’s Robotics Engineering Program, told Digital Trends. “The spear itself is cocked using a ratchet mechanism that stretches elastic bands. The next available spear tip is then rotated into position in front of the cocked spear, ready for the next shot. After each shot, the spear is re-cocked and the next tip is rotated into position. The spear tips themselves float: They stay in the speared fish and are buoyant enough so as to float the tip and the lionfish that was speared up to the surface for collection.”
Although the technology has so far only been tested in the university’s pool, it could one day be used in the open ocean. It could be deployed to hunt autonomously, before returning to the surface when it needs to be recharged or after a set period of time. The robots could potentially be privately owned and used as a fishing tool to harvest fish, which may then be sold. (Lionfish happen to taste great!)
“This year’s MQP (major qualifying project) will primarily be focusing on navigation and path planning,” Putnam continued. “The robot ideally should be able to autonomously descend to an appropriate depth, plot a search pattern, and start searching for Lionfish. It should be able to do all this without running into the reef or targeting anything but lionfish. There is a lot of work to be done, but these are all solvable problems.”



