

“That’s how they git you. They’re under the goddamned ground!” So says Val McKee, the hired hand played by Kevin Bacon in 1990’s classic comedy creature feature, Tremors. McKee is referring to the Graboids, an invertebrate species of monstrous giant worms which travel underground, pushing aside dirt while they dig.
The folks at the University of California, Santa Barbara, and the Georgia Institute of Technology have been working on a robot that’s not a million miles from the Graboids. While it’s currently a lot smaller, and far less prone to munching on unsuspecting cattle and humans, it’s nonetheless a tunneling, snake-inspired creation that’s able to burrow through soil or soft sand. And maybe, its creators claim, even one day the surface regolith found on other planets. Is this the future of space rovers yet to come?
“We have developed a type of burrowing robot that takes a new approach to burrowing, by trying to reduce resistive forces rather than combating them,” Nicholas Naclerio, a graduate mechanical engineering student researcher at UC Santa Barbara, told Digital Trends. “The three principles [that] enable it are tip extension to eliminate drag along its sides, air fluidization to reduce the resistive force of granular media, and asymmetry to control lift forces produced in horizontal burrowing.”
Sandwormvines go digging
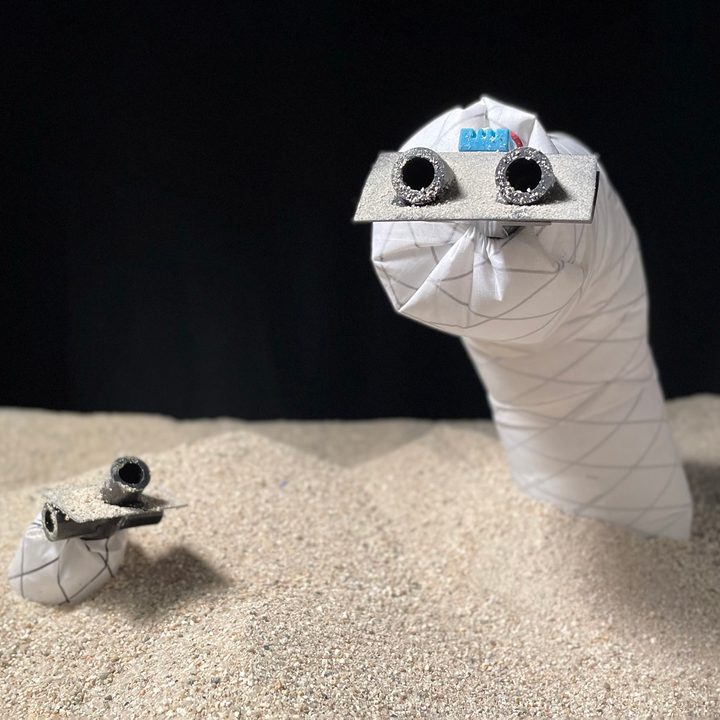
The robot itself is surprisingly low-tech. Its body is made of an airtight, ripstop nylon fabric. A nylon tube supplies air to its tip, which blasts aside the particulate in front of it to clear a path as it wends its underground way. A carbon fiber braid adds torsional stiffness, while a Teflon sheath reduces friction. The robot’s movement is pneumatically driven by compressed air or nitrogen, allowing it to move under the surface.
Naclerio said he was unfamiliar with the Tremors Graboids (although the Sandworms of Dune are another story.) In fact, while the robot was definitely nature-inspired, it seemingly wasn’t based on worms or snakes at all.
“Our robot is directly inspired by plant roots, which grow from their tips to extend deep into the soil,” Naclerio said. “By extending from its tip, the robot avoids friction along its sides, and can turn in any direction. We also took inspiration from the southern sand octopus which expels a jet of water to help burrow into the seafloor. Our robot blows air from its tip to fluidize the sand near its tip, reducing the force it needs to burrow into the ground. Lastly, we used an asymmetric airflow direction and angled wedge at the tip of the robot to help control lift forces. This was inspired by the sand fish lizard, which uses its wedge-shaped head to help it burrow into sand.”
This unique design helped the team to overcome the “challenge of lift” in horizontal burrowing. “When we first tried to burrow horizontally, our robot always surfaced,” he said. “It turns out that a symmetric object moving horizontally through a granular media experiences lift, because it’s easier to push material up and out of the way than it is to compact it down. We addressed this by blowing air straight down, to reduce the strength gradient that causes lift, and by adding [the] wedge to the tip of the robot.”
Burrowing snake robots on the moon
So what applications could this burrowing snake/vine robot have, then? And, more importantly, could it be scaled up to displace large quantities of sand or earth? “We believe that the principles presented in this paper could be used to expand the capabilities of conventional burrowing methods, particularly in horizontal and steerable burrowing,” said Naclerio.
As far as use-cases go, the more pedestrian terrestrial ones might include assorted ditch-digging activities. “One of the earliest visions we had for this project, is that the robot would burrow down, under, and up on the other side of a driveway to install an irrigation or communication line without the need to dig a trench,” Naclerio said. “Other applications include search and rescue, geothermal loop installation, granary inspection, and more.”
It’s that “more,” perched non intrusively on the end of granary inspection, that makes for the most compelling (and science fiction) use-case of them all. “We think that the robot is particularly well suited for dry, low-gravity, extraterrestrial environments, where reactive forces may be difficult to produce,” continued Naclerio. “Example applications include thermal sensor placement on Mars, volcanic tunnel exploration on the moon, asteroid sampling or anchoring, and granular ice exploration on Enceladus, a moon of Saturn.”
The idea of using this technique to explore low-gravity environments in space might sound farfetched. However, the team is currently collaborating on a project with NASA to cover some of these exact applications. Who knows: Maybe worm robots in space isn’t quite as crazy as it sounds!
A paper describing the work was recently published in the journal Science Robotics.



