
Remember the iconic scene in Edward Scissorhands where the endearing, titular, scissor-fingered misfit shows off his sculpting skills by chopping a great hunk of ice into a breathtaking carving of an angel? Researchers at ETH Zurich’s Computational Robotics Lab and the University of Haifa have created a robot that does something similar — only with blocks of styrofoam instead of ice, a flexible heated rod instead of scissor hands, and a 2020 dual-arm industrial robot instead of an early-’90s Johnny Depp. But, apart from that, it’s totally the same thing. Meet RoboCut.
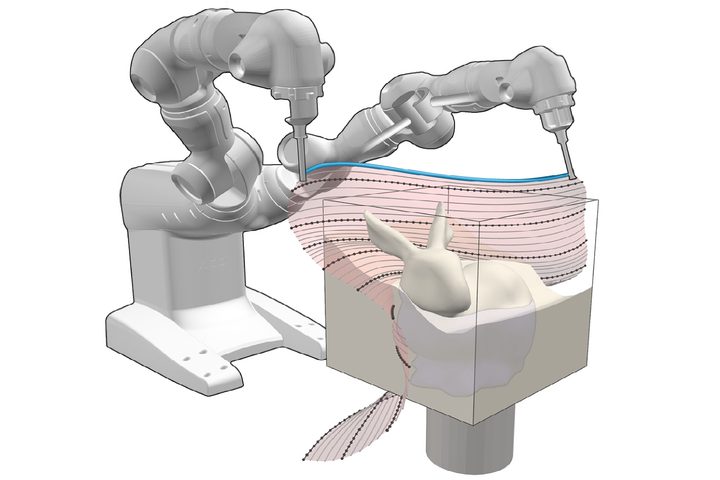
“With RoboCut, we enable robots to use deformable tools to efficiently fabricate complex objects with intricate curved shapes,” Simon Duenser, a Ph.D. student who worked on the project, told Digital Trends. “We apply this to a technique called hot wire cutting, a method where a heated wire is used to effortlessly cut through expanded polystyrene foam. While traditionally a straight wire would be used for this, in our case, the dual-arm robot uses a flexible rod. This allows it to continuously adapt the shape of the tool to match the curvature of the target surface, such that it can be produced more efficiently and with higher quality.”
As can be seen from the video up top, RoboCut is capable of transforming a cube of styrofoam into all manner of shapes, from a cute bunny rabbit to a shark. It’s an impressive party trick — but the really impressive part is the motion-planning algorithms required to compute the right movements for the robot arm to manipulate its cutting implement so that the correct object gets carved accurately.
“In order to compute these robot motions, it is first necessary to accurately predict the shape of the tool caused by the robot’s movements through a physical simulation,” Duenser explained. “We then need to solve the so-called inverse problem, which is essentially the question of how the robot needs to move such that the resulting path of the deformed tool will sweep a surface that matches the desired shape.”
There were some big challenges to overcome, namely, combining an understanding of the physical modeling of the tool shape, approximation of the target shape, and the generation of collision-free motion trajectories. Individually, these would be tough optimization problems. Together, they’re a whole lot more difficult. Nonetheless, the team pulled it off brilliantly and showed that such optimization problems can indeed be formulated and solved. So long as you’re a computational wizard, that is.
A paper describing the work, titled “RoboCut: Hot-wire Cutting with Robot-controlled Flexible Rods,” is available to read online.



